














































































347
366
21世纪了 扫地这种事就交给机器人吧 篇一:均衡好用无硬伤的扫拖一体机器人-追觅W10Pro全方位实测报告
2022-03-02 11:09:56
8点赞
3收藏
16评论
大家好,我是 @微醺的工程狗,只用真实实验推荐良心好物的家电博主~
就在3个月前,追觅发布了其免洗扫拖基础版W10,微醺就有幸拿到了样机进行测试,W10在处理混合污渍,传感器配置,越障能力上给我留下了深刻的印象,远远优于免洗扫拖的鼻祖云鲸J1,但最大的遗憾是W10在避障性能和APP操作方面还有所欠缺,当时我也给追觅提出了改进建议,没想到短短两个月时间,追觅就推出了有针对性的改良版本:追觅W10Pro,同时W10普通版的App也进行了大升级。这样有意思的产品,微醺怎么能错过呢~ 于是厚着脸皮找追觅申请了一台样机,今天就来跟大家反馈下我这半个月来的测试和体验结果~
为方便小伙伴们有一个参照,选取了免洗扫拖机器人的鼻祖云鲸J1参与横向对比~
利益声明: 本文除追觅和云鲸提供的测试样机外,无任何恰饭,可放心服用。
一、外观

外观上W10pro与W10一脉相承,干净利落,保持了优秀的质感,但是在主体和基站的缝隙处鎏了一圈金边,对于极简爱好者而言,这是降颜值的操作...
二、硬件配置
底盘

1. 边刷
追觅W10Pro采用五脚边刷,比传统的三脚边刷防击飞效果更好。
作为参照,免洗扫拖鼻祖云鲸J 1使用的是最常规的三脚边刷。
边刷:W10Pro=W10>J1
2. 主刷
W10Pro和W10一样,采用了浮动主刷采用毛刷+胶刷组合,地面贴合好,W10Pro的有效主刷长度为 19cm,在同类产品中属于佼佼者,清洁力度强范围大,几乎与拖布同宽,这样才能保证拖布处理的区域是先被主刷清扫过的,做到真正的先扫后拖。但这种常规刷头的防头发缠绕比较一般,好在影响不大,就算缠绕了,也只是损失少量清洁能力,就算不清理也能正常工作,以我的经验来看,一个月清理一次缠绕的就完全足够了。最后,D形机身的设计,让它可以处理到更多的边角位置,但D形机身在通过障碍物时灵活性比圆形机身差一些。
云鲸J1没有主刷... 只有一个吸风口... 且没有浮动,地面贴合不佳,因此扫地能力是偏弱的... 而且扫地和拖地不能同时进行,必须更换模块... 模块在地上来回滚,通常是很脏的,换模块的体验非常差,扫拖无法同时进行,是云鲸最大的痛点。
主刷配置:W10Pro=W10>>J1
3. 拖布
追觅两款机器的拖布均采用了目前主流的旋转拖布,设置在主刷后方,可以做到扫拖同步,前扫后拖。旋转拖布在旋转时与基站肋条摩擦实现自清洁,基站只需提供清水即可,减少活动部件,可降低故障率。拖布有浮动设计,自带下压力,与地面贴合度好。拖布与机身边缘的距离为3.5cm,也就是说在处理墙边时,至少有3.5cm的距离是拖布拖不到的死角区域。
云鲸J1最大的优势是两块三角形的拖布,三角形转动起来后,交叉区域比五边形更深,因此两块拖布之间的死角更小,而且拖布与机身同宽,理论上处理墙边区域时,可以做到完全不留死角,但实践中表现没有预期的那么好。
拖布配置:J1>W10Pro=W10
4. 地毯识别
追觅均配有超声波感应器,用于识别地毯,可主动避让地毯,避免拖布打湿地毯,也可以对地毯进行加强吸尘处理。
云鲸无此传感器。
地毯感应配置:W10Pro=W10>J1
拖布烘干方式

追觅W10和W10Pro的基站均配置了热风烘干,可加快拖布烘干速度,避免微生物滋生,烘干时间大约3-4小时。
云鲸是冷风吹干,烘干速度较慢,吹风时间12小时以上,但可能成都天气比较潮湿,吹风结束后拖布依然比较湿润,如果每天都拖地的话,可能出现拖布还没干就又被打湿的情况。
烘干配置:W10Pro=W10>J1
抗菌方式
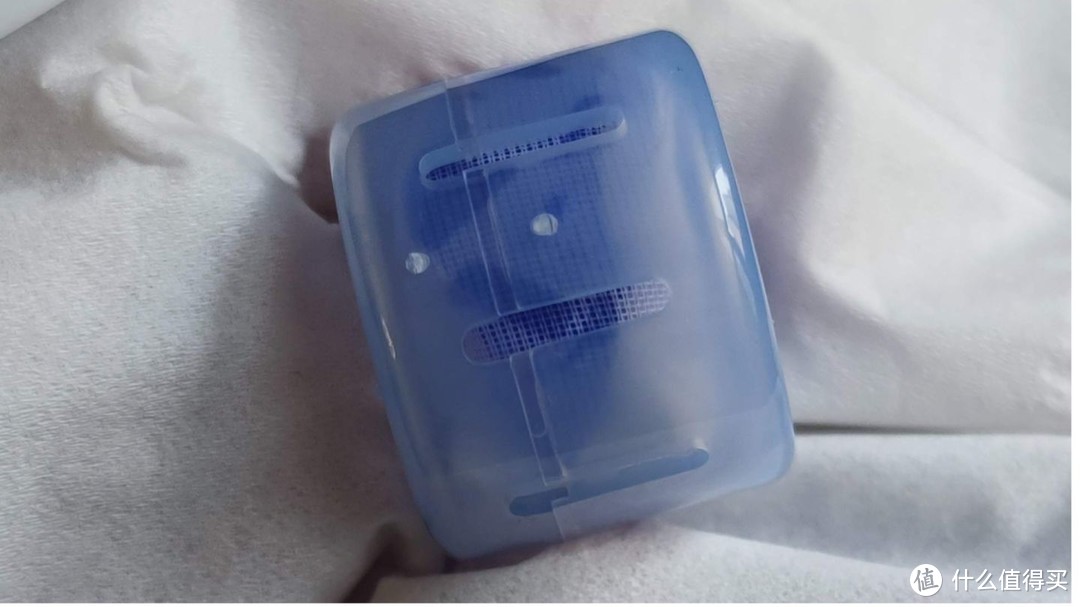 W10Pro的银离子缓释模块
W10Pro的银离子缓释模块
追觅W10Pro采用了银离子抗菌模块,通过缓释银离子达到抑制细菌的目的,银离子在水中可稳定存在,其作用类似于催化剂,在杀死细菌后,银离子并不会被消耗,从细菌尸体中脱离出来还可以继续工作,因此可以持久地发挥抑菌作用,银离子杀菌的有效性也有大量文献资料可参考。

相较于同样比较流行的电解水杀菌,银离子的最大的特点是活性持续时间更长,因此进入污水箱之后依然能发挥作用,抑制污水箱中的微生物生长及异味,而电解水的特点是快速产生大量有效抑菌物质,但它们的寿命很短,几个小时就会消耗殆尽,适合用于即时清洁,但对污水箱除臭的帮助不大。
追觅W10和云鲸J1均没有配置抗菌模块。
抗菌性能:W10Pro>W10=J1
地图和清洁规划传感器

W10Pro和J1的地图规划采用了有LDS激光雷达,特点是地图扫描速度快,精度高。
但W10Pro的LDS雷达有压力传感器,可防止扫地机被一些高度较矮或复杂的家居卡住。
欧式家居下部的裙边和部分床底非常容易将扫地机器人的LDS雷达卡住,而有压力感应的机器人在识别到有碰撞挤压无法正常通过后,会绕开这个区域,避免被困。
规划传感器:W10Pro=W10>J1
避障传感器

追觅W10Pro采用了TOF+AI视觉避障传感器,是目前性能最强的避障方案之一,TOF的特长在于判断是否有障碍物但不善于识别物品类别,AI擅于识别物品类别但有一定几率识别失败,两者协作互补不足,进而规划出最合适的避障方案。
W10和J1的避障则采用了最基础的机械避障+红外避障传感组合,对正前方,高度较高的障碍物可做到不碰撞绕行,但高度较低或者侧面的障碍物则靠轻触触发机械避障后才绕行,不过有个小细节追觅做得更好,它在碰撞条上设置橡胶条减小碰撞感应时产生的撞击力度和噪音,可以更好地保护家居,但这类传感器配置无法对地面的小物件进行识别,例如数据线小玩具一类的东西,还是会被推开。
避障传感器配置:W10Pro>>W10>≈云鲸J1
基站清洁
追觅和云鲸均配置了可拆卸的底盘,方便取出来清洁,而且底盘上凹槽有轨道,即使地面非常湿也不易打滑,云鲸J1的磨砂轨道在个别时候有打滑的现象导致无法顺便进入基站。
小结
综上所述,硬件配置方面,W10Pro,W10,J1的主要特点是:
追觅W10Pro在W10的基础上升级了强大的避障传感器以及一个银离子抑菌模块。
云鲸J1几乎是全方位落后,无热风烘干,无地毯识别,无主动避障,无主刷扫地能力弱,无LDS压力感应,最难受的是扫拖分离设计,导致扫拖无法同时进行;
云鲸J1的优势只有与机身同宽的三角形拖布,可减小拖地过程中的死角区域。
我们在接下来的实测中看看这些硬件配置上的差异能给我们带来怎样的实际体验吧~
三、扫拖性能测试
家庭环境中,需要机器人处理的常见污渍有粉尘类,颗粒类,纸屑类,毛发类,水渍类,油污类,因此微醺给它们准备了一份超豪华混合大礼包~ 来看看它们能不能应对家居环境中复杂的污渍情况。
混合污渍豪华大礼包
可可粉-模拟粉尘类污渍,沾水后会变得粘稠,增大测试难度,同时可可粉颜色深,在浅色地面上,更方便观察。
纸屑-模拟纸屑类污渍,在沾水后会吸附在地面上,难以被吸尘器吸走。
长头发-模拟毛发类污渍,同样在沾水后会吸附在地面上,难以被吸尘器吸走。
干黄豆-模拟颗粒类污渍,且圆滑易滚,密度高,考验防击飞能力和吸力大小。
红色白板笔-最初考虑的是使用油性口红,但后来在测试中发现,口红产生的污渍强度受产品配方和涂抹手法影响太大,一致性非常差,稍稍改变手法就能得出完全不一样的效果,复现性不好。因此改用了更稳定更容易操作的白板笔进行实验,大多数小伙伴都用过白板笔,对其擦除的难度也有体验,而对于扫拖机器人而言,需要它清洁的地面一般不会比白板笔涂出来的更脏,能将白板笔痕迹处理干净即可说明它清洁力度合格了。
最后,为了考验机器人对边缘的清洁能力,将混合污物布置在墙边,于是就有了下面这幅景象~
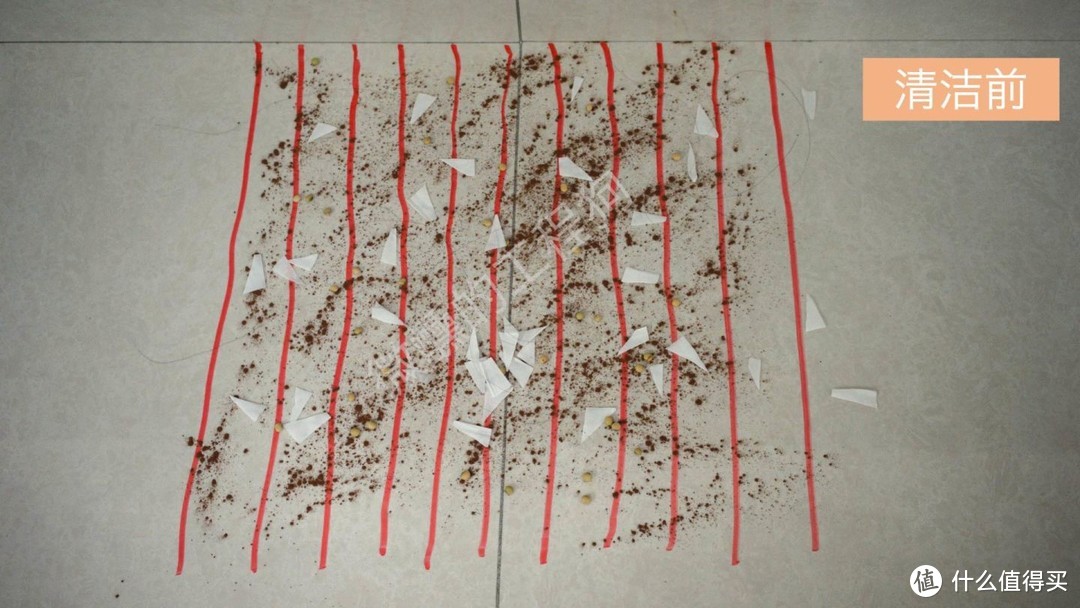 制备好的混合污渍大礼包
制备好的混合污渍大礼包
主体区域清洁能力
W10Pro
追觅W10Pro设置为最强吸力+三档湿度+双倍清洁,然后开始扫拖,视频中可以观察到在第一次通过时留下了一条缝,这是两块五边形拖布交界处清洁力度不足造成的,不过经过井字型上下纵横打扫后,最初留下的缝也被清理干净。
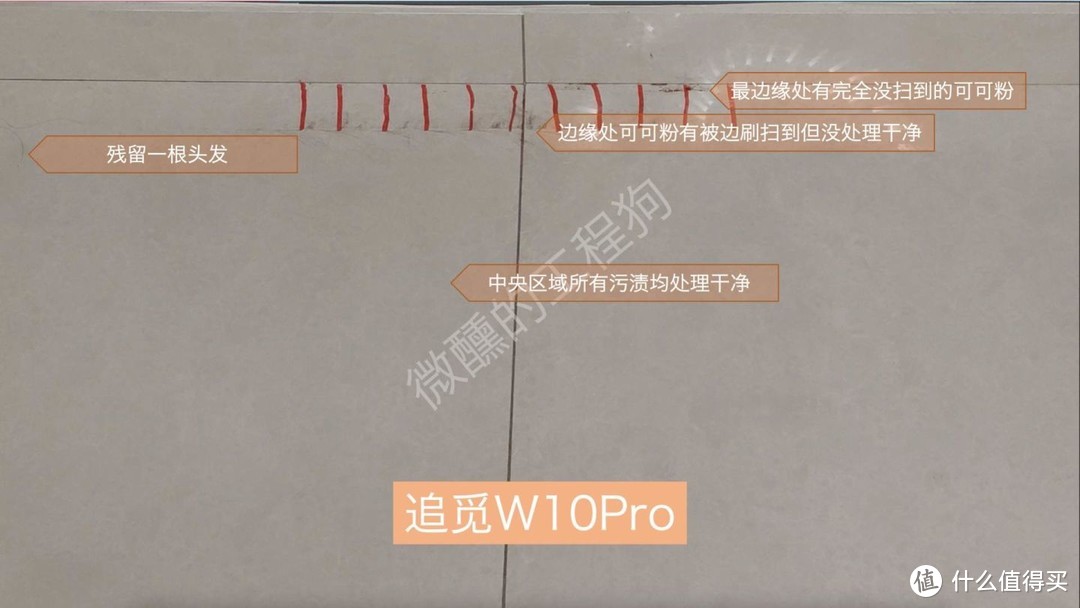
清洁完成后,可以看到整体清洁效果非常强,中央主体区域内的黄豆,纸屑,可可粉,头发都打扫干净了,但靠近墙边有一段死角区,清洁效果较弱。
云鲸J1
云鲸J1没有扫拖同步功能,因此用它处理混合污渍大礼包除了把污渍涂抹均匀外没有啥其他作用。

这是意料之中的结果,也是云鲸最大的缺点,即使升级到J2,依然没有做到扫拖同步,因此没有一台扫地机器人跟云鲸配合的话,它基本是个残疾。
清洁死角
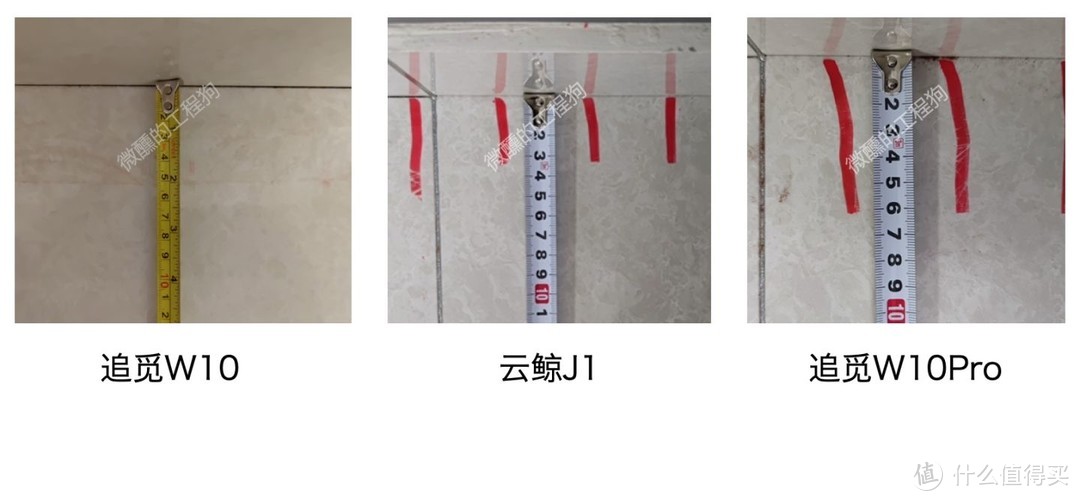
近距离观察W10Pro,W10以及J1在墙边产生的死角区域。W10Pro和W10的边刷对固体污物有效果,可以将它们送进主吸口抽走,但对白板笔痕迹毫无办法。J1只处理白板笔痕迹时,产生的死角区域明显更小。
测量三款机器的死角区域,W10约为6cm,W10约为5cm,云鲸J1为3.5cm。虽然云鲸的死角区域最小,但其拖布与机身同宽,有得天独厚的优势,理论上可以做到无死角,我对它的期望其实是1-2cm,最终实得3.5cm有点点遗憾。
小结
通过混合大礼包的测试可以得出结论:追觅W10Pro的扫拖同步进行,可有效地处理由纸屑,可可粉,头发,黄豆,白板笔构成的超强混合污渍,清扫能力应对日常清洁需求绰绰有余,唯一比较遗憾的是墙边死区较大,比自家的W10宽了约1cm。
四、避障能力
障碍物高度递减实验
避障是衡量扫地机器人性能非常重要的一项指标,扫地机器人的初衷是为了节省人类的体力,加重懒癌病情,纵使它清洁能力再强,如果天天被奇奇怪怪小玩意儿困住,房屋打扫不完全不说,还经常需要你去解救它,增加人类的工作量,这显然违背了它的初心。
不同的避障方案对不同形状的障碍物有不同的反应,为了稍微定量一点地去衡量一台扫地机器人的避障能力,我设计了下面这个实验~
将厚度约7mm的三角磁力片叠成两块厚度35mm的障碍物,放在机器人的必经之路上,然后让机器人通过这个区域,观察它的避障状态,若成功避过,则减去一片磁力片,重复实验,直至机器无法识别眼前的障碍物为止。
当磁力片数量为5,障碍高度为35mm时,W10Pro完美避过,毫无压力,实验继续。
当磁力片数量为4,障碍高度为28mm时,依然完美避过,实验继续。
当磁力片数量为3,障碍高度为21mm时,依然完美,实验继续。
当磁力片数量为2,障碍高度为14mm时,这个高度已经低于机器的越障高度了,W10Pro在它面前踌躇了一段时间,似乎是AI在判断这到底是个需要冲过的坎还是需要绕开的障碍物,在小心试探后绕过了障碍物,但试探过程中碰到了磁力片,造成位移。避障能力开始减弱但没有完全失效,因此实验还可以继续,再减一片磁力片。
当磁力片数量只剩1片,障碍高度只有7mm时,W10Pro表现得很遵守交通规则... 在绿色磁力片面前毫无减速地直接吞进去了... 但回过头时,AI似乎看到了前方有一个红色磁力片并小心地绕了过去...
从这个实验可以总结出一个规律,当障碍物高于2cm时,W10Pro可以非常轻松地识别出来,并妥善绕行;当障碍物高度在1-2cm时,W10Pro通过综合利用从TOF和视觉传感器获得的信息,依然能比较好地识别并绕行,但识别成功率和有效性开始减弱;当障碍物低于1cm时,TOF就比较难就比较难判断这是地上的脏污还是需要绕行的障碍物了,识别主要靠视觉AI来实现,识别绕行成功率下降,所以对于数据线这种超矮贴地的障碍物来说,识别可能存在一定成功率,不能做到100%避让。
生活物品实测
接下来我用一些生活中常见的小物件测试了W10Pro的表现。

首先出场的是拖鞋,没有避障的机器人经常把拖鞋推到奇奇怪怪的角落里,W10Pro能成功避开它吗?在描边清洁时,触碰了一下拖鞋,但没有把它推走,表现合格。
第二个出场的是经常跟扫地机相爱相杀的体重称,在AI和Tof的加持下轻松避开~
第三位出场的是臭袜子,非常轻松地绕过了。
第四位选手是用过的餐巾纸,也没什么悬念,轻松通过。
第五位是粗壮的电源线,W10Pro显得很谨慎,为避免吸入线头,AI选择了绕一个大圈尽量避免与电源线接触,几番试探后也顺利绕过了。
压轴出场的是大魔王数据线老哥,因其纤细的身材,机器很难辨别它是需要处理的脏污还是障碍物,与处理电源线时相似,在经过一翻试探后,W10Pro也绕了过去,没有触碰到数据线。
因此,在单独遇到一些生活中常见的障碍物时,W10Pro采用的TOF+AI避障方案表现得非常好,没有什么压力,但在真实生活中不比实验,每次都是一个单独障碍物出现,可能是在狭小空间里出现多个不同种类的障碍物,W10Pro还能从容应对吗?
复杂工况测试
既然单个障碍物难不倒W10Pro,那微醺就给它加点难度,看看它的极限在哪里~ 于是设计了这个有复杂多障碍的环境来考考它~

第一次实验,在复杂工况下,椅子,餐巾纸,电源线等常规障碍物都没给W10Pro造成什么困难,几乎无接触通过,但到了数据线大魔王这里,果然还是让W10Pro吃了瘪。

第二次实验给它略降了一点难度,使用体重称替代了大魔王数据线的位置,再来一次实验,这次W10Pro出色地完成了任务,只在描边清洁时轻触了一些物品,没有发生缠绕,卡死等事故。
W10和云鲸J1的避障...
它俩都是冲撞型选手... 跟W10Pro没有可比性...
越障高度
越障高度是一个非常重要的参数,特别是中国家庭普遍存在门槛石这个东西,造成家居环境里经常有1cm以上的大落差,越障高度不够就会被困在房间里出不来...
W10Pro官方标称越障高度1.8cm,拿出祖传的18.3mm厚木板,让它们爬爬看~

追觅W10Pro和W10都可以轻松越过1.8cm的木板,而云鲸J1则无法通过,J1的越障能力显然不够优秀。
小结
通过这么多测试可知,W10Pro的避障性能较W10普通版有质的提升,可明显降低机器人被缠绕卡死,推着小东西到处跑,甚至引发次生事故的可能性,从我实际体验的这半个月来看,没有特意对家居环境整理的情况下,它一次都没有被屋内的障碍物困住过,兢兢业业地完成了每一次扫拖任务。但需要注意的是,避障并不是100%完全可靠的,特别是针对难度最高的数据线,在一些极端情况下避障有一定失败率,因此建议平时还是将能收起来的小物件尽量收起来,数据线电源线最好离地或固定,更有利于获得更好的体验。
五、APP及其他小细节
定制清洁方案

W10Pro的app较W10有一个重要升级,就是支持对不同房间制定单独清洁方案了。
例如,我家平时其实很干净,容易产生较多污物的主要是厨房和卫生间,因此我将这两个区域设置成了最强吸力+最大湿度+双倍清洁,其他区域酌情降低清洁力度,这样就可以保证全屋清洁的情况下,又尽量节省耗水耗电,延长换水时间了。
宠物识别

W10Pro由于有AI视觉加持,因此App支持宠物模式,加强AI对宠物粪便的识别,避免机器人把粪便在房间里给涂抹均匀了...
一键退出基站
W10之前没有一键退出功能,如果要取尘盒,需要弯腰下去把机器拖出来,不甚雅观,W10Pro支持一键退出基站功能,取尘盒的动作优雅方便多了~
语音控制

在App中设置好房间名称后,即可通过小爱同学命令W10Pro去清洁对应的区域,例如在厨房中做完饭后,地面可能会有少量酱汁和污物,趁它们还没干的时候最是容易清洁,这时只需告诉小爱打扫厨房,机器人就去厨房做清洁了~
W10老用户关怀
上述升级的App功能,除了宠物粪便识别需要硬件支持外,其余的像清洁方案定制,一键退出基站,语音控制这些,追觅都给W10老用户在新版固件中升级了,没有一出新品就把老用户给抛弃了,这点还是很厚道的。
六、优化建议
W10Pro的App和使用体验相较几个月前W10已经有了不小的进步,但还有一些小细节希望追觅能继续优化:
地毯识别:现在的地毯识别在装了拖布的情况下会自动回避地毯,即使打开地毯增压选项也会避让地毯。其实地毯的日常维护方式无非是强力吸尘+湿抹布擦拭,这不正好是一套扫+拖程序吗?实际测试下来,拖布清洁后地毯只是微湿,半个小时左右就会自然风干。因此为了更好地保持地毯卫生,地毯识别应该加上一个选项,允许在装有拖布的情况下,识别到地毯后自动转换到最强吸力,这样更为合理一些。
拖布清洁频次按区规划:目前的拖布清洗频次只能统一规划,每5/10/15平米清洗一次,或者每清洁完一个区域后清洗一次,但不同区域对清洁频次的需求显然不一样,例如卫生间我肯定希望它清洁完成后立马回去洗拖布,而客厅卧室这种平时比较干净的空间可以拖15平米再回去洗拖布,现在的App还不支持这种针对不同区域的细分规划。目前我建议在地图上尽量将房间分区做得精细一点,然后选着每清洁完一个区域后回洗拖布的模式,在清洁顺序上,优先清扫卫生间,厨房,门厅这种污染比较严重的区域,然后再清洁客厅,卧室这种相对干净的区域,比较迂回地满足不同区域不同清洁频次的需求~
优化多倍清洁逻辑:现阶段的多倍清洁的工作流程是:沿墙边走一圈-横向Z字型扫拖一次-纵向Z字型扫拖一次。这样做相当于给中央区域进行了一个井字形纵横交错的扫拖,中央区域的清洁力度相当强,但最难清洁的边角区域反而只进行了一次清洁,略显不合理。另一个问题是,双倍清洁的第二次清洁模式与第一次清洁相同,但实际上,扫地通常扫一次就足够了,二次清洁更多是为了多拖一次地,再扫一次有些浪费,特别是当扫地使用超强吸力模式时,对续航的影响较大。应该允许对多次清洁设置不同的模式,例如第一次是扫拖同步,第二次是只拖地,这样更为合理。
优化单次清洁的行进方向:目前在使用单次清洁时,行进方向一旦确定,以后每次的清洁都会维持这一方向,如果这个模式下有一些缝隙死区处理不到,那么就会一直都处理不到,建议可以设置成,第一次走横向Z字,第二次清洁相同区域时走纵向Z字,这样交叉进行覆盖可以更全面有效地清洁地面。
AI避障的暗光识别精度:W10Pro有两只眼睛,一只是tof传感器,不惧黑暗;另一只是AI视觉避障,对光线要求高。在暗光环境下,相当于瞎了一只眼睛,避障准确性会收影响。目前最简单的解决方案就是通过智能联动来给机器人补光。例如我家现在设置的是工作日上午10点开始自动清洁,清洁时间大约1小时,于是我又设置了一个早上10点自动开灯,1.2小时后关闭的自动场景,这样就能给机器人提供足够的光线了,简单粗暴效果好~ 建议在米家APP里的场景推荐中加上这个方案,方便用户更快捷方便的设置好自动化,例如扫地机进入了哪个房间,若是房间没有开灯,那就自动打开这个房间的灯,扫地机离开后再关闭~
毛发防缠绕:追觅W10Pro自带了一个毛发梳,对付短一点的毛发还行,但遇到女生的长头发就无能为力了,目前抗缠绕比较强的是刀片切割方案,通过在滚轮内内嵌往复式刀片来回切割,将长毛切断从而达到破解缠绕的效果,希望追觅以后能跟进一下这个方案~
自动上下水:W10Pro比较遗憾的是依然没有官方上下水套件,对上下水有刚需的小伙伴暂时只能通过第三方配件或DIY解决。
自动集尘:倾倒尘盒虽然不是一个特别麻烦的高频操作,但毕竟也是一个需要人参与的操作,拍打尘盒时会产生巨量灰尘,体验也不是很好,所以若是能实现自动集尘的话,对体验的提升也是有一定帮助的~
更强的吸力,更强的避障:W10Pro的吸力不弱,有足足4000Pa,而现在市面上消费级产品里最强吸力在8000Pa这一档,比W10Pro高了整整一倍,虽然4000Pa够用,但谁会拒绝更强的吸力呢?8000Pa吸力用来处理地毯那是极好的~ W10Pro的避障很强,在一众扫地机器人也算得上第一档的成员,但在一些极端情况下,避障也会失效,还需进一步打磨算法,提高成功率,精益求精才是~
八、总一个结
追觅W10Pro采用TOF+AI方案给W10来了一个大升级,并附带了银离子抗菌,定制清洁方案,语音操作,一键操作等体验优化,价格却几乎不变,相当于加量不加价,可以说诚意满满。
W10Pro具备了拖布免洗,扫拖同步,旋转下压厚拖布,避障优秀,基站清洁友好,操作方便,米家统一控制等优秀特性,从我实际使用的这半个月来看,它平时的表现也没有让我失望,一次都没被家居环境困住过,清洁力也是杠杠的,在3000-4000这个档位上,性价比极为突出,追觅自家的W10突然不香了...

不过W10Pro也不是完美的,希望后续的机型能增加3个功能:自动集尘,自动上下水,切割式防缠绕方案,最后再努一把力,把吸力怼到8000Pa,这应该就是扫地机器人的究极进化体了~
九、网友问题
是否漏水?
微醺发现有小伙伴在追觅相关的文章里反复强调有漏水的问题,于是我也专门留意了一下,我家W10和W10Pro都没有发现漏水,于是我上网找了一下看看这个漏水到底是怎么漏的。
最后只找到了一例视频,从该up主上传的视频来看,这是污水没有正确排走产生的问题,污水不能顺利排走,淤积在底部清洗盘,再有清水进来的话,自然就会溢出导致看起来像是机器漏水了。所以这是一台的故障机,任何产品都有一定的故障率,出现问题,联系厂家退换货即可。
但追觅老版固件这里有一个bug,传感器已经感应到水位异常了,还在继续往清洗盘注水,导致水满溢出。新版固件已修正了这个问题,在传感器发现异常后,便停止工作,并提示用户排查故障,避免了溢水给用户造成不必要的麻烦。
扫拖同步是否会降低清洁效果,特别是针对头发的清洁力度?
这也是小伙伴们关心的一个重点,其实在混合大礼包的测试中,我们已经看到它可以有效处理头发类污物了,但在测试中我设置的是最强吸力最大湿度双倍清洁,实际使用中,我们可能不会使用这么强劲的清洁力度,因此我在日常使用中观察了一下它对头发的清洁力度。
这是我家洗漱区,领导每日都会在这里贡献巨量的头发,对该区域的清洁设置为最强吸力标准湿度单次清洁。
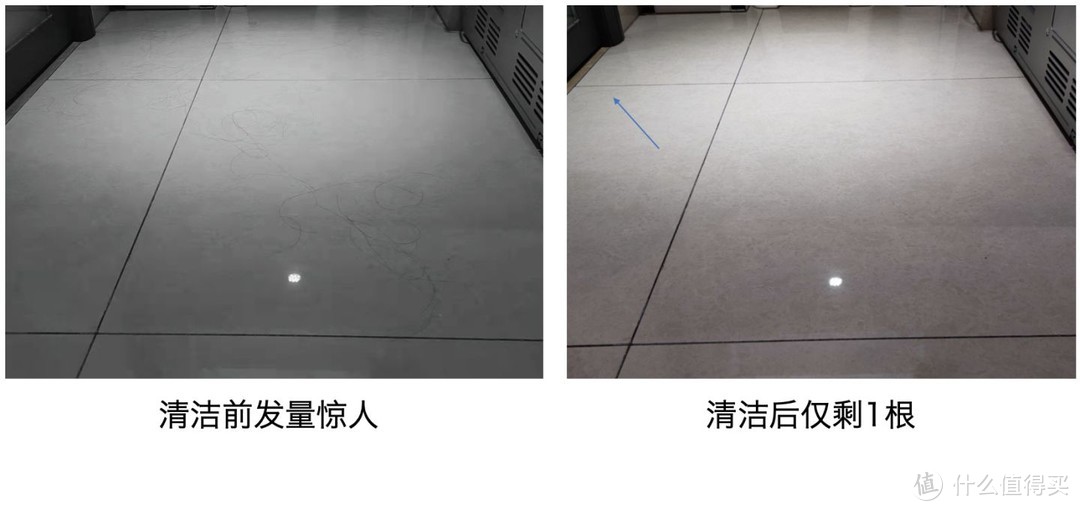
最终密密麻麻的长头发,在经过一轮扫拖后,最终只残留了一根没被吸进去的头发,头发清除率接近100%。
因此通过合理设置,我对我家的地面卫生情况非常满意,全屋头发残余量都在个位数,不认真找根本注意不到有头发,地面更是用餐巾纸擦不出灰,而且连最难处理的地毯也是擦不出灰的程度,后续的机型如果能再压缩一下墙边的拖布死角就更好了~
作者声明本文存在利益相关性,请大家尊重作者及分享的内容,友善沟通,理性决策~
















fgg1991
校验提示文案
fgg1991
校验提示文案
亿无名
校验提示文案
虤臦
校验提示文案
维修小能手
校验提示文案
维修小能手
校验提示文案
亿无名
校验提示文案
虤臦
校验提示文案
fgg1991
校验提示文案
fgg1991
校验提示文案