






















































































263
101
理工科小白到底能不能玩:KittenBot迷你巡线小车(豪华版)众测
2018-02-27 12:00:00
1点赞
4收藏
3评论
认识张大妈快300天了,每天除了汲取大家的剁手经验,也在不断的申请众测,之前一直也没有中,导致我一度怀疑这个众测是不是只是给内部几个人的,但是在我发了一篇我儿子玩具的帖子之后,居然真的申请到了KittenBot的豪华版巡线小车机器人。在此要感谢张大妈平台,也感谢小小值们,因为通过这件事情,我知道平时我们发的帖子,你们是真的看了,并且记在心里,这个工作量应该是很惊人的!另外我还想说,众测真的是真的!想要得到众测,一定要好好写原创,功夫不负有心人,有付出才有收获啊!
啰嗦了一堆心里话,下面首先是拆包晒物的分割线-------------
通知获得众测后第三天,包裹就到了,其实我的心情是既激动又忐忑的,因为我是个理工科小白,高中时期严重偏科,语文拔尖,史政尚可,数理化严重瘸腿。大学时期一看微积分就头疼,我很怕完成不好众测任务,而这又是多么来之不易的机会呀!
但就是这样,才能测试出,开机即玩到底是不是真的吧。
收到包裹最初的样子。

第一次获得众测机会,把《众测须知》也晒一下。
《众测须知》下面就是产品包装盒,外面裹了一层泡泡塑料,防震还是做的很到位的。

包装盒的大小,男士们请参考马克笔,女士们可以参考黄金按摩棒,盒子非常的小巧。

盒子打开后,里面的内同。巡线地图一张,用户指南一份,主机和模块们。

巡线地图展开图。大概2张A4纸大小。

说明书是长条的,正反面折叠形式。
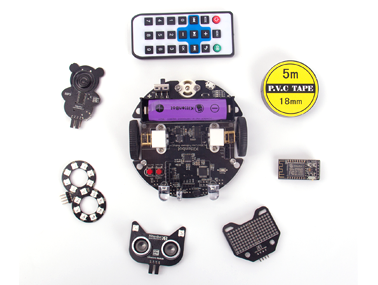
机器人主体、所有模块、遥控器、数据线、胶带,这些是全部内容。

先来看看机器人主体,让我觉得非常的精致,紫色电池的配色也很赞。
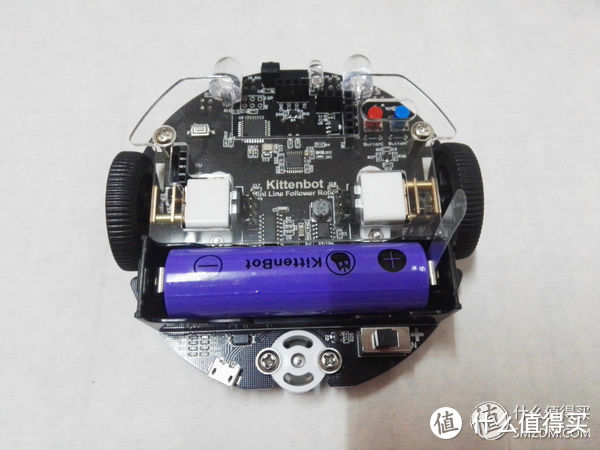
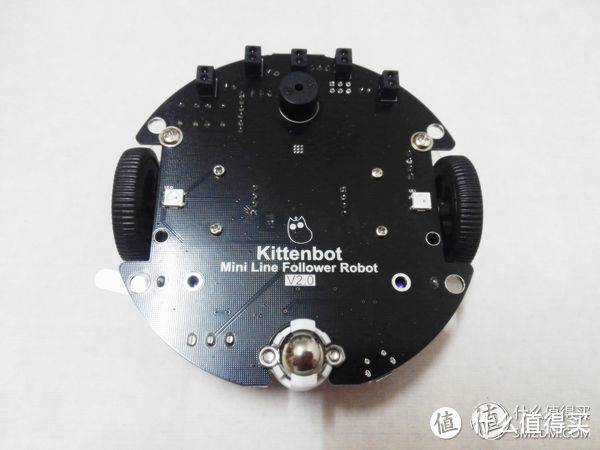
背面图。可以看到版本是Mini LFR V2.0
机器人大小展示,比贝亲的婴儿爽身粉还小一点点。

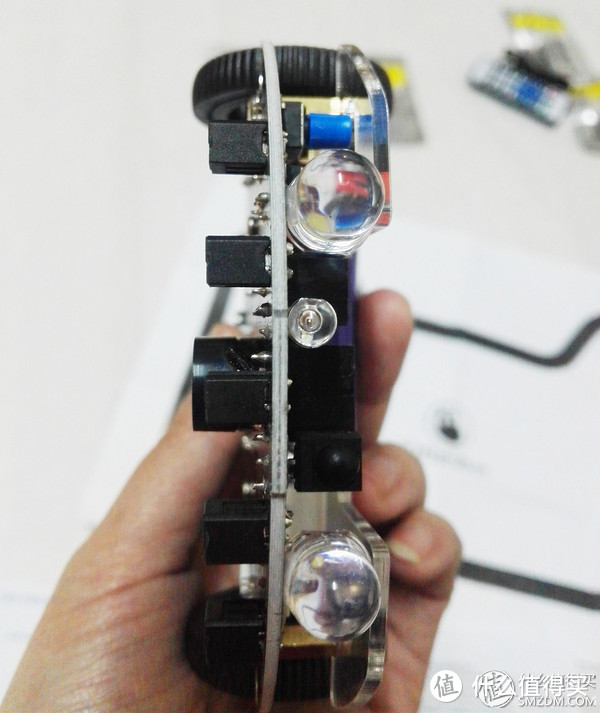
2张侧面细节图,看下各种元件的焊接。我虽然理工科比较白痴,但是各种零部件是否精细、整齐、美观无毛刺还是会看的,个人感觉机器元件焊接非常精密,而且很精致。

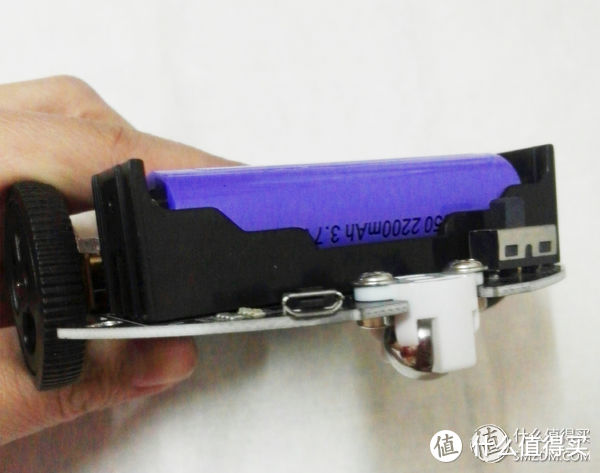
电池侧下面有一个小小的数据线接口。
以上,是拆箱和外观展示部分。看了说明书,初级入门包括巡线功能和避障功能,下面就这2方面进行测试。
巡线测试
这个重点要强调几点:
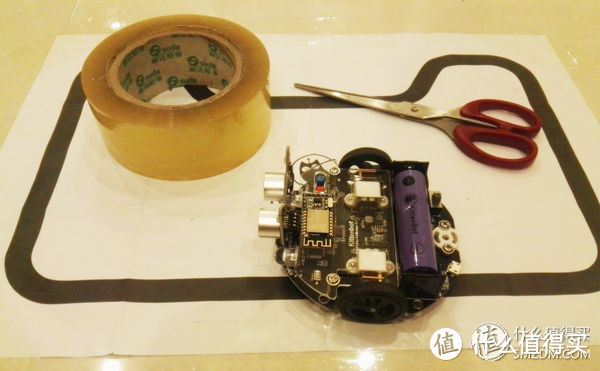
一定要把巡线地图用透明胶粘平整,一定要平整!一定要平整!不然不能巡线!我一开始就是没有粘上,然后小车就原地打转,本来我就很忐忑,急的我一脑门汗。
说明书上Button 1和Button 2的颜色标反了。导致我这种小白一直按那个蓝色按钮,小车原地转圈,后来上了官方论坛才看出来,花了一个晚上才搞明白。
按了按钮后要放到黑线上,而不是放到地图上什么位置都行。说明书上写的是放到巡线地图上,而我根本没理解,一开始是放在正中间了,完全不能巡线,后来也是在官方论坛上看了帖子才搞懂了,理工小白终于让小车开始巡线了。看着小车开始巡线还是挺有成就感的,宽宽看到妈妈这么爱学习也会受到鼓舞吧!
正确步骤为:打开开关——按红色按钮——放到黑线上。录了一个小视频。可能我这个地图还是铺的不太平,小车偶尔有脱轨现象,但是它居然自己能找回来,还是满智能的。地图应该与地面完全贴合,下次用胶直接粘地上也许会好些。
避障测试
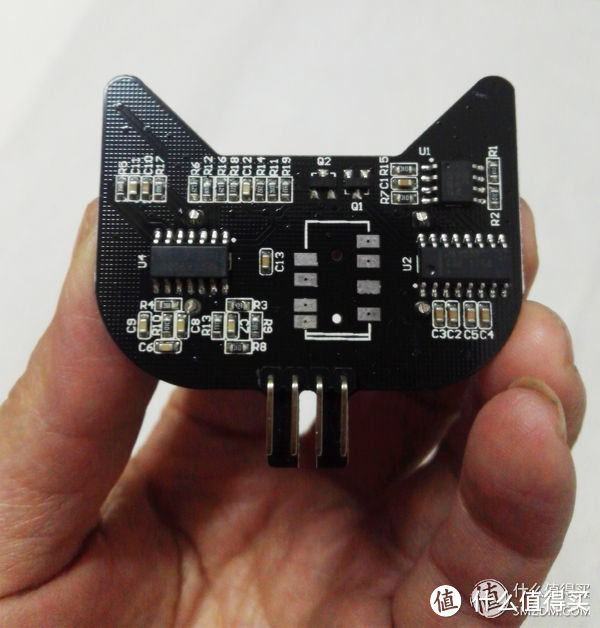
避障模块,图案做的非常萌,猫眼睛很有科技感,但是整个模块看起来却不像机器人冷冰冰的感觉,如果孩子们玩的话,会很容易被它的可爱所吸引,连我这个大人都觉得爱不释手。背面也是非常精密,很高端的感觉,与主体连接的插针,非常精致。

与主体连接好后的样子。表面在灯光下是这种小格子磨砂面略微反光的视觉效果,很值钱的样子。

打开开关,按下蓝色按钮,小车就自己开始壁障了。试了几次,发现一个问题,就是小车的正面灵敏度较高,但左右侧30度角的位置是死角,如果碰到障碍物会剐蹭向前行驶,不能避开。这个在下面的视频一开始处也有反映,我看到论坛上有说这个壁障可以设置感应距离,不知道距离设置的远一些会不会解决这个问题,等我学会了在下一篇时再说一下。下坡车正面灵敏度还是很高的,在凳子腿桌子腿林立的餐桌下,也能自由行驶。
总结
优点:
小车整体非常精致可爱,颜值过硬!让我感叹“怎么可以这么萌”!
入门简单好上手,容易激发学习兴趣。毕竟像我这种理工小白也把小车开起来了。
模块多、功能多,性价比较高。
小巧不占地方。作为一个多模块的机器小车,在体量上非常容易收纳。
积木式编程相对好上手。看了下编程部分,感觉很有信心能学会。而不像某些计算机语言类的编程,看着就一个脑袋两大。
需改进之处:
作为一个几百元的产品,说明书过于简单了,尤其对文科妈妈们非常不友好,应该把说明书再完善一下。
说明书按钮颜色和实物出现不一致实属低级错误。既然分开了颜色,不如直接标注蓝色按键、红色按键,不要再标注Button 1和Button 2了。
最好配备教学光盘,更加直观易懂。
最后
对于人生第一次的众测任务,本人是非常重视的,非常想写一篇详尽又有参考意义的众测报告。然而作为一个理工科小白,局限于自身能力和知识储备问题,在编程这一块进展有点慢,还没有准备好编程部分的图片和视频,很多图片拍了还来不及整理和后期处理,而交稿的日子就这样迫近了......所以此篇报告暂作为我的巡线小车众测的第一篇,先完成规定动作交作业,等完成编程部分的图片和视频编辑后,近期一定再写一篇众测。
再次感谢张大妈、感谢小小值们的辛苦工作!
本文商品由什么值得买提供,并邀请用户撰写评测报告。更多新奇好物请关注众测活动~
















taogujin
校验提示文案
lleaves
校验提示文案
私语凝风
校验提示文案
私语凝风
校验提示文案
lleaves
校验提示文案
taogujin
校验提示文案