














































110
37
【行业】为啥地瓜机器人会加速普及具身智能?
2025-01-09 10:43:20
0点赞
0收藏
0评论
摘要:个人观点是,地瓜机器人作为通用机器人“之心”,对具身智能普及做到了推波助澜的关键作用。
作者:撩数码
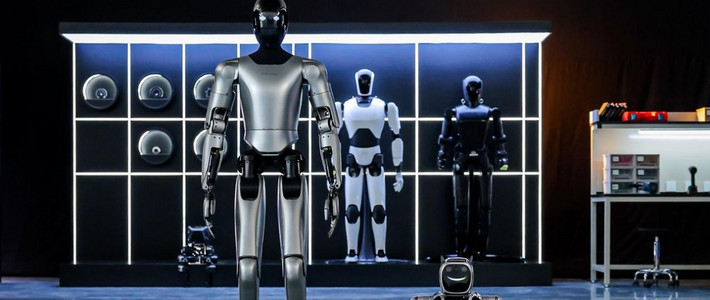
关于机器人,从科幻电影到现在的各大公司推出的产品,最不可分割且经常引发人深思的,就是机器人应该是什么样、它们与人类之间应该处于怎样的关系。
其实早在1921年,一部名为《机械人》的电影,定义了一个可以遥控的人型机器,这大概是人们最初对机器人的概念印象。这部电影中的机器人有类似于人类的四肢、简单的关节机构以及像玩偶的脑袋,但这也对后世的机器人有了比较大的影响。

不过近几年争议较大的机器人角色,则是电影《普罗米修斯》的大卫。就机器人形态而言,大卫这类机器人无疑是最为成功的。大卫形态的机器人不仅行动能力与人类相同,还具备将古代语言挑取共通点并总结为工程师语言的能力。在大卫的后续机型瓦特(出现于异形:契约),维兰德公司为其定义为“为服侍而生”。并且在近几年的《异形》系列电影中,此类机器人的职责则更为重要,不仅是人类的人型帮手,甚至开始负责管理空间站、飞船的,显然这些机器人已经具有足够高的智能程度,如果按现在流行的话来讲,就标志着这些机器人是具有具身智能能力的。
在深入探讨今天的话题之前,首先需要搞清楚一个问题:什么叫具身智能?
从软件定义到自主思考,具身智能不再是想象。
回到现实,具身智能的概念在1950年首次被提出,1991年现代机器人之父罗德尼·布鲁克斯发表的研究论文《没有表征的智能》里,强调了智能行为可以从自主机器与其环境的简单物理交互中产生,不依赖于预先设定的算法。
简单来说,具身智能需要具备自主感知、认知、理解、推理和行动的能力,其能力水平应等于或高于人类。具身智能机器人的优势在于能够不依赖预先设定的算法,实现自主感知与应对。
然而,实现具身智能意味着机器人需要具备类似于人类大脑水平的算力,这需要对硬件和软件进行多重优化。以目前的科技水平,AI的实现通常依赖于CPU、GPU和NPU的组合,其中CPU负责基础运算任务,GPU负责AI相关的并行计算,NPU负责类神经网络计算。然而,要实现具身智能,通常需要庞大的硬件堆叠(例如多个GPU),这会导致巨大的功耗,在软件底座方面,需要让机器人能够在不依赖数据的情况下了解物理世界,并更高效地完成任务。因此,机器人的智能化并非简单的硬件堆砌,其核心开发能力需要涵盖硬件和软件两个方面。可以说,机器人背后的公司或许比人型机器人更重要。

在全球市场,机器人将成为下一轮产业升级的引擎,这已经成为行业内的共识。大家比较熟悉的特斯拉的Optimus,但拥有机器人核心开发能力的公司不止特斯拉一家。例如,国内的地瓜机器人同样瞄准的是机器人开发的基础设施、套件和生态,以形成一个完整的“生态”,力求在未来通过与合作伙伴来实现真正的具身智能。
从硬件到软件,为的是做好机器人生态
提到地瓜机器人,或许大家会比较陌生,它是从地平线分拆出来的业务。在智能驾驶领域,地平线的名声基本上为许多人所知。从其智能驾驶芯片产品线可以看出,地平线的解决方案涵盖了芯片和软件底座,整体体验非常出色。地瓜机器人在机器人领域,也在推动包含软硬件的通用底座普及。
比如在2024年9月推出的旭日5智能计算芯片、RDK X5机器人开发者套件以及拥有具身智能的算力核心RDK S100。旭日5是一款针对机器人开发的计算芯片,它拥有的能力是通过BPU+CPU+GPU+DSP来实现本地计算,从芯片端就可以实现“看”、“听”、“想”、“做”,这也符合具身智能不依赖于算法实现感知与应对的特点。而RDK X5开发套件则针对中小创客和个人开发者,提供软硬件底座来加速实现全栈开发流程。针对未来具身智能的创新应用,RDK S100则拥有更强大的算力与灵活扩展性的接口,来满足具身智能的相关开发需求。从这次发布的产品不难看出,地瓜机器人的目标是将具身智能的相关体验从芯片端就开始融入进去,既方便开发者也方便产品制造者。

而对于长远发展而言,显然地瓜机器人不论是面向合作伙伴还是广大开发者,构建完整的“母生态”才是重中之重的事情。地瓜机器人开发者生态负责人胡春旭在接受撩数码专访时就表示,类似Wintel就是最好的“母生态”实例,它可以统一世界上所有PC,同时在这基础下,又有通识应用这些“子生态”,而地瓜机器人就在努力的重铸这样的“母子生态”。
“我们想真正做的是能够覆盖全球大家所有在用的机器人底层的整套软硬件平台,衍生出来之后,未来里面可能有人形机器人的子生态,可能有扫地机的子生态。
不同子生态的整个开发者的角色氛围是完全不一样的。比如扫地机可能偏商业,目前的人形是一个很偏开发者很开放的生态,两个感觉并不一样。所以我们的核心还是想要去赋能各式各样的机器人,每个机器人可能会有各自的一些特性跟属性的生态。”胡春旭表示。
到2024年,讨论最多的还是具身智能机器人酷不酷(包括外观),以及什么时候我们能买得起。不过从地瓜机器人的角度,很明显具身智能机器人会更贴近生活一些。地瓜机器人开发者生态负责人胡春旭举了个例子,人型机器人没办法满足人类从A到B的需求,但智能汽车可以,其实智能汽车它也是一种机器人。由此可见,未来的机器人肯定会是多种多样的,既有类人形态、也有像现在机械臂、扫地机器人、汽车这种形态的,只不过他们都可以自己“看”世界、做自己的判断。

很明显,对于地瓜机器人而言,需要做的并不是去定义具身智能机器人长什么样,而更有价值的是它们拥有什么功能,以及怎么更方便地创造出它们。这又回到了老问题,开发生态和价格。仅售五六百元的RDK X5,恐怕是这个价位生态最齐全的开发板。RDK开发者套件的RDK-copilot功能,就可以让开发者借助大模型来生成代码,并且代码不需要微调就可以实现相应的功能,这无疑大幅降低了开发门槛。在发布会上宣扬的闪连+RDK Studio+RDK Copilot组合能够10分钟玩转机器人开发这件事,基本上能够实现机器人相关开发的快速迭代。核心就是,地瓜机器人更多关注的是做好整个生态,以高性能的硬件+体验+有竞争力的芯片价格作为抓手,让更多的企业/开发者乐于打造基于该生态的机器人产品。
毕竟用得人更多,其芯片开发库就会越完善,体验就会越好。
AI大模型背景下,机器人迭代能力是关键
AI大模型这个概念,不得不说现在已经成为各个行业的大热门。然而在机器人开发领域,AI大模型并未提现到它的价值。地瓜机器人对AI大模型的引入,明显是一种不同的理解。
比如机器人开发,RDK-Copilot已经能够做到“人类下需求,AI出代码”,承担一个变成助手的角色。在有AI大模型帮助下,人类编程员需要负责的工作更多地是要告诉AI它哪里错了,并监督分析结果。这无疑更够更好地提高机器人编程的效率,造成的结果就是在短时间内产出更完善的机器人开发系统,或迭代出更完善的版本。

在机器人发展方面,最核心的能力就是如何让它们自己学习,如同我们上学一样。具身智能机器人学习内容的主要形式之一,就是感知世界、收集对应信息,就是数据采集。由于AI的特性,收集数据越多,机器人就会越聪明。大模型在机器人发展领域的作用,就是让机器人能够持续学习,越来越聪明,而这说起来容易,做起来则会遇到诸多挑战,比如在大模型赋予开发者更为便捷的同时,如何能“泛化”就是开发者需要面对的挑战,核心就在于如何更高效的进行数据采集,这不就再次指向了大模型赋予机器人的势能?
所以,具身智能机器人的迭代,可能并不像现在机器人那般需要人类推出OTA,而是通过自己学习快速适应人类世界场景。而AI大模型的加入,则会加速这个进化过程,让机器人的动作能力变得更像人类。
如今,虽说距离下一轮产业升级还有几年时间,但机器人的爆发将会是迅速的。地瓜机器人对自己的定位非常明确,就是打造生态、让更多的人更容易开发,爆品自然就在这其中。此时,谁做好更快迭代、更完善的生态,在未来的主动性会更高。