









































































263
101
清洁电器 篇二十一:【2023年科沃斯X2 Pro测评】科沃斯首款方形机器人性能究竟如何?
2023-09-09 18:48:58
5点赞
9收藏
6评论
一、缘起
大家好,我是Z先生,专注清洁电器测评。N年下来测过体验过摸过的扫地机器人,早就超过百余台,今天和大家分享的是2023年科沃斯全新的方形机器人X2 Pro的真机测评。本次测试机器是我自购,和品牌方无任何关联,大家可以放心食用。

2023年以来扫地机器人整体销量和销额继续承压,行业门槛却越来越高。头部品牌进一步挤压小品牌的生存空间,新品牌几乎没有市场声量,市场马太效应进一步加剧。行业内卷发生在头部品牌,2023年新款包括:
科沃斯T20系列、升级T10系列、以及本文测评的X2;
石头更新了G10系列、推出G20,还推出了首款对旋拖布系列P1;
追觅继续全面对标头部品牌,包括升级S10、推出S20、X20、X30;
云鲸依旧走自己的路,推出新款J4;
小米除了推出免洗2、全能扫拖2,还推出了单机机型3C增强版、3S、扫拖3(单机版);
科沃斯本次推出X2系列,距离上一次的X1系列已经过去2年。之前的X1 OMNI是行业首款全能基站机型,销量非常好,一度成为行业标杆。这次的X2,是科沃斯精心打磨的新系列。机器发布时全网早就有工程机的合作文章发出,本文测评使用自购量产机X2 Pro,包括我自己对产品的理解和视角,可能全网不会有类似的内容,希望对大家有帮助~
本文系作者原创,已经同步至本人公众号(Z先生测评),未经授权不接受任何形式的转载、洗稿!
二、科沃斯X2升级了什么?

就不罗列X2的具体参数了,主要说一下升级点:
① 方形机身:摒弃了圆形平台,换成了方形,是X2最大的升级之一。好处是边角清洁、坏处是转向复杂。
② 下沉的半固态激光雷达、更矮机身:X2不再使用常见的机械式激光雷达,改成了半固态激光雷达,是半固态激光雷达在扫地机器人上的首次应用。X2内置2组激光模组,扫描频率高,机器反应速度快、路径规划能力较强。
③ 大吸力+长滚刷+拖布抬升:扫拖方面,X2最大吸力8000pa(匹配竞品)、滚刷长度提升到20cm提高扫地效率、对旋拖布可抬升高度为15mm几乎业内最高;
④ 避障算法升级:使用结构光+AI的融合方案,避障算法进一步升级;
⑤ 基站升级:X2基站尺寸更小,清洁盘和上坡终于可以拆卸,解决了维护的老大难问题。基站60°热水洗拖布,高配版X2 Pro有脏污识别传感器。
⑥ 视频管家 & 语音助手:YIKO语音助手和视频管家功能升级。语音助手有家具图谱功能,可以识别模糊指令;视频管家功能更丰富,如新增HDR。
⑦ APP:UI全新设计,风格和设计逻辑更新
总的来说,X2从形态和功能上打破了科沃斯原本的产品设计,配得上科沃斯最新最强旗舰的称号,对标同业5000+的机型。
#X2系列有两款机型,X2是基础版,X2 Pro是X2的高配版(本文测评机型)。X2 Pro的最大吸力更高、电池有快充、基站多了脏污传感器机器可实现复拖并生成脏污地图。
三、开箱
好了,我们直接开箱
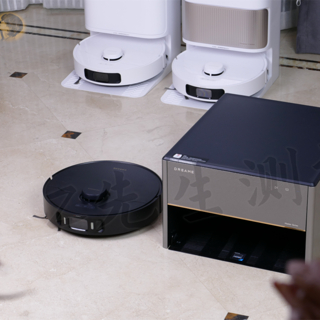
1、整体
X2 Pro外形设计较老款改变很大。2019年的X1系列、到2021年的T10系列、再到2022年的T20系列,科沃斯一直采用Jacob Jensen Design的设计框架。基站尺寸大、也较为方正、使用圆形平台。X2系列则降低了基站和主机尺寸,占地空间更小,放置更有余地,上坡和清洁盘也终于可以取下。
具体地,X2的基站高、宽、深为52.75cm、39.4cm、44.3cm,科沃斯今年新款T20的基站高、宽、深为57.8cm、44.8cm、43cm。也就是说X2的高度和宽度均缩小了5cm左右,深度变化不大。另外,X2的重量也明显下降,之前搬X1或T20时手感很沉,X2手感质量适中。

我入手的X2 Pro是全黑色,X2基础版是全白、全灰色,配色倒是可以百搭家具。
2、主机
X2的主机变成了方形,打破了行业常规的圆形设计。
严格来说是偏长方形机身,在尾部有一定弧度。方形机身理论上边角清洁能力更强,但对转向提出更复杂要求(碰到障碍物不能像圆形机型那样直接转向,一般需要后退再转向)。
X2主机整体做工优秀,顶部上盖是磁吸设计,做了金属拉丝工艺。顶部的机械激光雷达『不见了』,改成了半固态激光雷达,位置在前撞板处左侧。原本激光雷达的位置,仅留下了用于拾音的麦克风阵列,正中间有一颗物理按键,用于开始/暂停、以及返回回充。

X2的机身高度为9.5cm,比多数机型要矮。不过,其实有不少机型的机身高度和X2接近,比如石头P10/G10S Pure的主机高度为9.65cm、追觅S10主机高度为9.7cm;另外,不同品牌近年来通过各种方案降低机身高度,比如较为常见的视觉导航(依旧有不少在售机型使用)、下沉激光导航(360 X100Max,机身高度85mm)、3D TOF导航(一点KK,机身高度85mm)等。
再稍微展开一点,其实我看到X2的第一眼,脑子联想到的是iRobot Roomba s9,以及当年那个百花齐放的年代。s9的机身呈D形,使用视觉导航机身高度仅为9cm,单边刷、双胶刷超长达到23cm,是不是有点熟悉的感觉?

回到X2,机器前侧是AIVI 3D 2.0模组,用于避障、导航和视频管家等。和X1相比,X2左侧的摄像头指示灯尺寸缩小、中间是3D结构光模组、右侧是RGB深度摄像头。整个AIVI 3D模组的结构较X1系列更加紧凑。
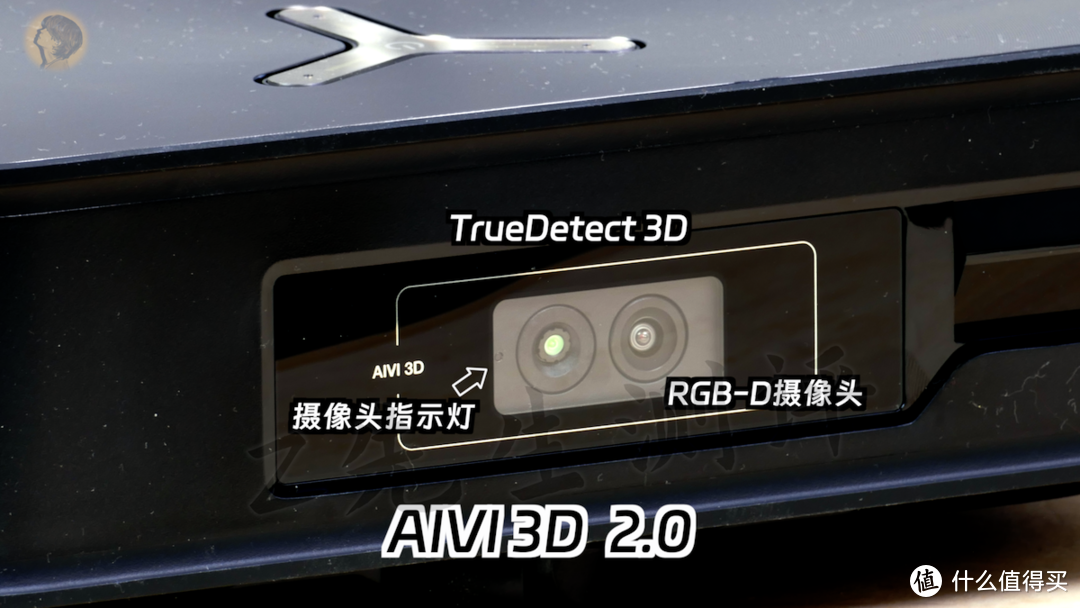
#当摄像头开启时,左侧指示灯亮绿色,提醒用户视频管家正被开启:

撞板左侧是半固态激光雷达,算是X2最核心的升级之一。放弃更为常见的机械式激光雷达,使用半固态激光雷达,也是扫地机器人领域的首次应用。半固态激光雷达其实在汽车行业已经较为成熟,使用固定激光器,通过微振镜转动改变扫描路径,实现动态扫描。

X2内置2组激光模组,有着更高的扫描频率、机器反应速度、以及更强的路径规划能力。
 动图
动图特别注意到,半固态激光雷达集成在可移动的缓冲撞板上,但移动方向限制为水平方向的前后、左右移动:
 动图
动图机器右侧是两个沿边传感器。若要机器发挥边角清洁的优势、保障清洁覆盖率,沿边足够好是前提。

取下磁吸上盖,中间是尘盒、右上角是主机开关和wifi连接按键。

取下尘盒观察,X2的尘盒结构和科沃斯之前系列差不多:
 动图
动图但仔细看还是做了不少升级,比如尘盒单向入风口做成了长条形,另外HEPA新增了抗菌涂层。

进一步观察,HEPA取下看背面,还有一层黑色抗菌滤网。特别地,X2的金属初滤组成了内凸长条形。这个设计细节,毕竟很多机型连初滤都没有,即便有初滤的机型初滤也容易粘毛发和灰尘,清理较为麻烦。X2这样的设计,基本打开尘盒一倒就能把初滤上附着的毛发灰尘直接倒掉。只有长期使用扫地机器人的用户,才有类似深刻体验。

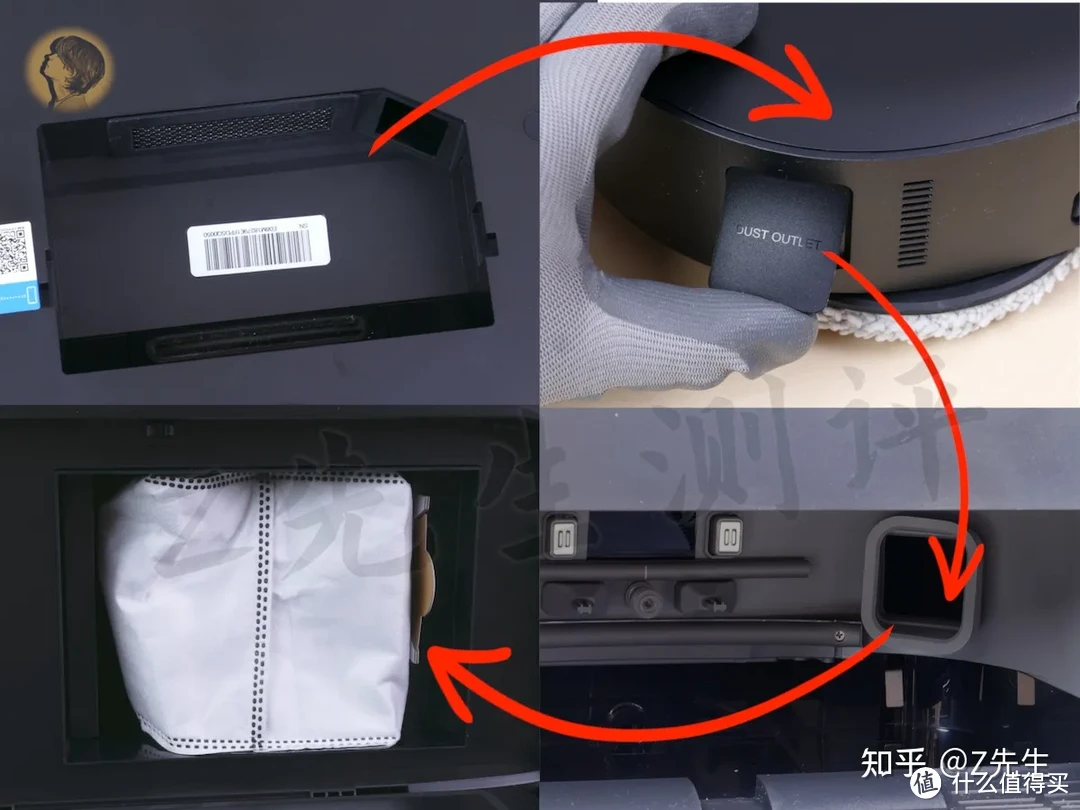
自动集尘的链路变化不大,同样是常见的一吹一吸,垃圾经过机身后侧方的出口进入基站,最后进入集尘袋。不过,可以明显看出X2的用料更足,比如机身垃圾出口的橡胶开关,非常厚重,不用时可以彻底闭合。相比之下很多机型这个开关就是薄薄的一层,使用几次后甚至无法完全闭合,有二次污染的问题。
再看主机背面的结构,有不少升级和变化。比如:
使用了单边刷,而科沃斯大多数老款机型都是双边刷;
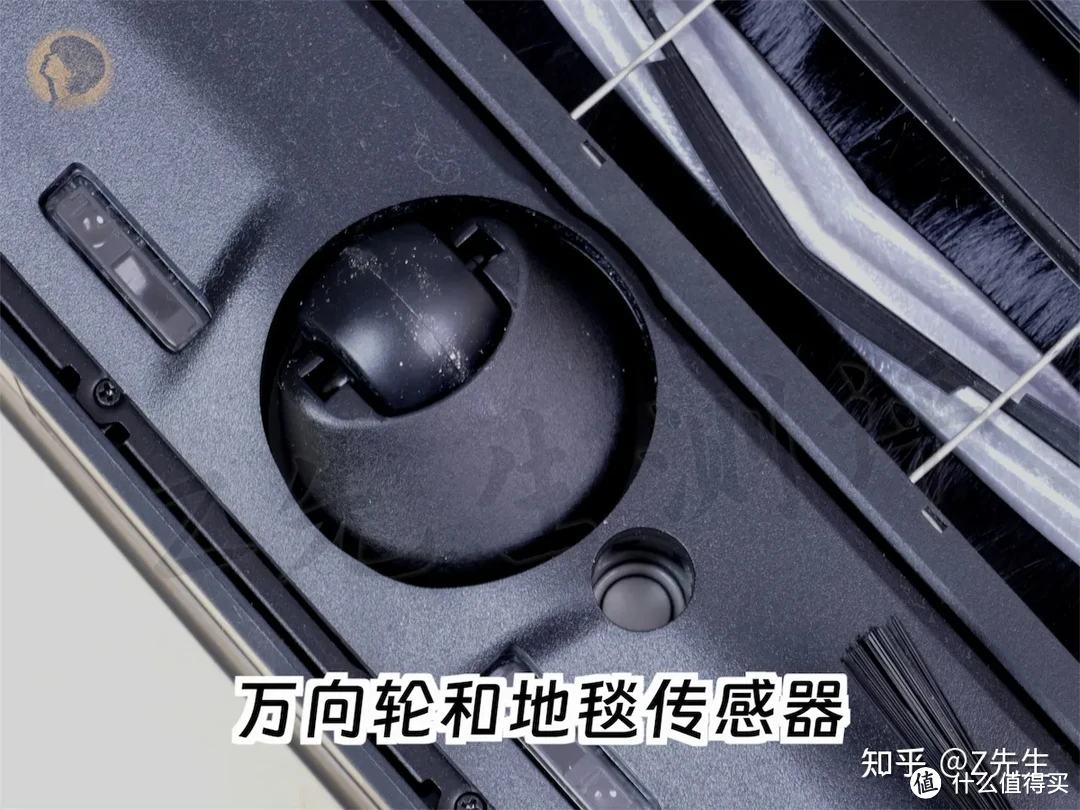
配置6组悬崖传感器;
配置地毯传感器;
20cm超长毛胶刷,几乎业内最长;
中滚刷结构往机器右侧偏(边刷侧),右侧清洁(沿边侧)效率更高;
对旋拖布可抬升;

具体来看,机器配置地毯传感器,配合拖布抬升,可识别地毯并抬升拖布上地毯、增压清洁。
X2配置单边刷,边刷三爪异形刷毛设计,有一定的毛发防缠绕作用。特别地,边刷插孔特别深插得非常紧,几乎不会发生意外掉落。

主机背面最『吸睛』的肯定是中滚刷结构,主刷超长达到20cm,比市面一般机型的16~17cm滚刷长得多。

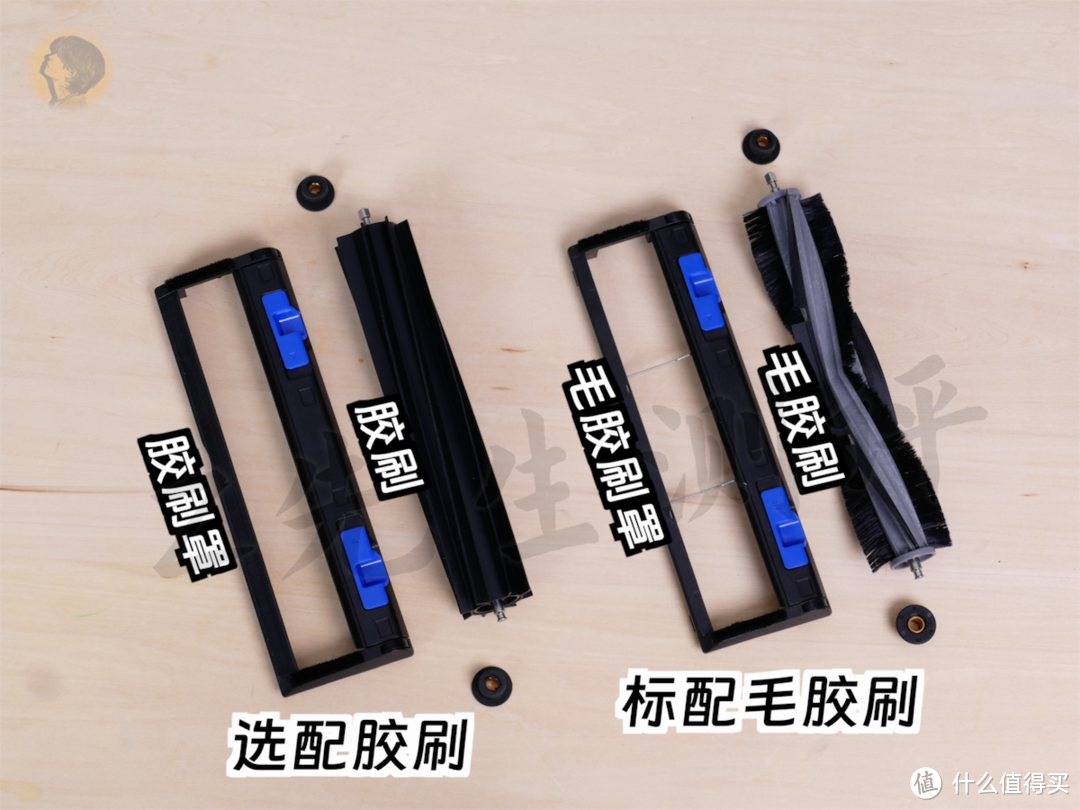
另外,除了毛胶刷,X2还配有一个纯胶刷。两者适配的主刷罩也不同,毛胶刷的主刷罩中间有金属丝,防止大垃圾卷入,金属丝的位置对应滚刷凹槽,用来收集缠绕毛发。并且X2的毛胶刷两头均可以拆卸,是科沃斯首款两头可拆卸的滚刷;胶刷的滚刷罩中间无金属丝,毛发会顺着胶刷的胶条纹路收集在两侧,胶刷两侧也可以拆卸。
毛胶刷两头设计不同,装入主机不会装反:

仔细看胶刷,X2的胶刷主体8根胶条,一粗一细间隔设计,但胶条材质略微偏硬。

X2的滚刷罩做工也比其他系列更好:

再看拖布,X2依旧配置雪尼尔材质的对旋双盘拖布,拖布材质较厚。拖布连接支架特别长,卡入机身非常紧,基本很难脱落。弹簧结构在主机上,而不是在拖布上。
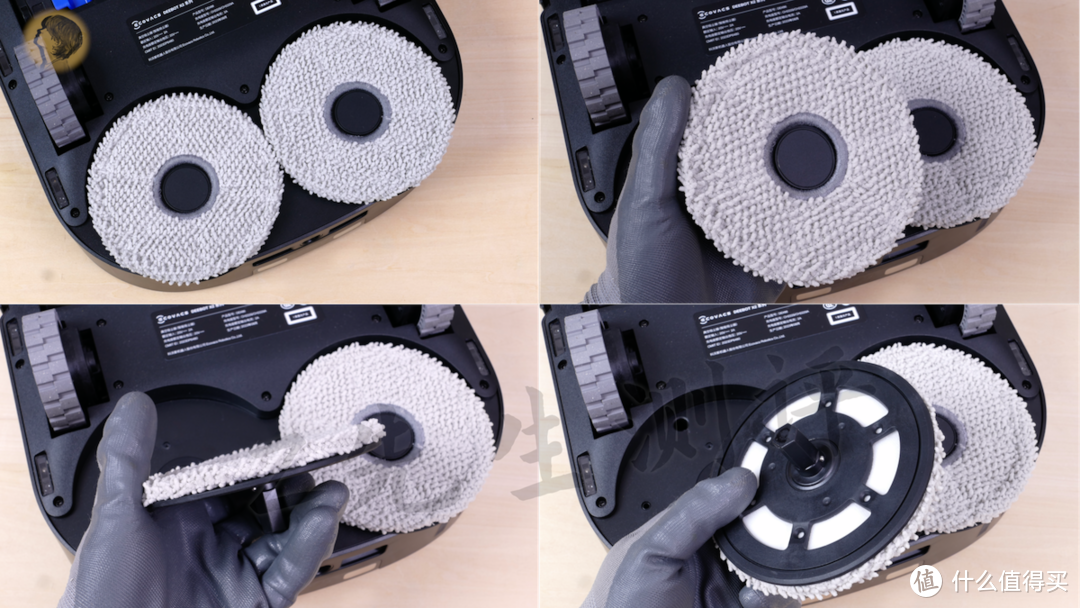
拖布抬升和降下的逻辑,是主机旋扣的正向和反向旋转。X2的拖布抬升高度是15mm,几乎是市面上抬升高度最高的机型。对旋拖布可抬升几乎是主流新款机型的标配,不过仅仅可以抬升是不够的,还要看抬升和放下的算法是否合理,以及抬升高度,特别就地毯清洁而言。
 动图
动图主机的尾部是充电极片、限位以及自动注水孔。有自动注水孔说明机身带水箱,水箱内置不可取下、容量180ml。参考市面上主流机型的配置,一般是机身水箱80ml(比如科沃斯、追觅的主流机型、石头P系列等)或200ml(石头G系列)等。X2的机身水箱容量介于两者之间。

机身水箱容量和回洗频率有一定的关联度,举个栗子,X2机身水箱180ml,回洗频率是10/15/25分钟;X1机身水箱80ml,回洗频率也是10/15/25分钟。从某种角度说,X2拖地时拖布湿润度比X1更有余地、相同时间内X2的拖布可以做到更加湿润。
3、基站
X2的基站除了前面提到的尺寸更小之外,外形也更圆润,边缘处多为弧形设计。
#这款X2 Pro的基站是有脏污传感器的,可以根据洗拖布的污水浊度判断区域脏污程度。基础版的X2无此功能。

顶部有半圈银色饰环,印着科沃斯地宝X系列:

基站仅有一个物理按键,位置在侧面的饰环上。短按开始/暂停,长按自清洁出水和抽水:

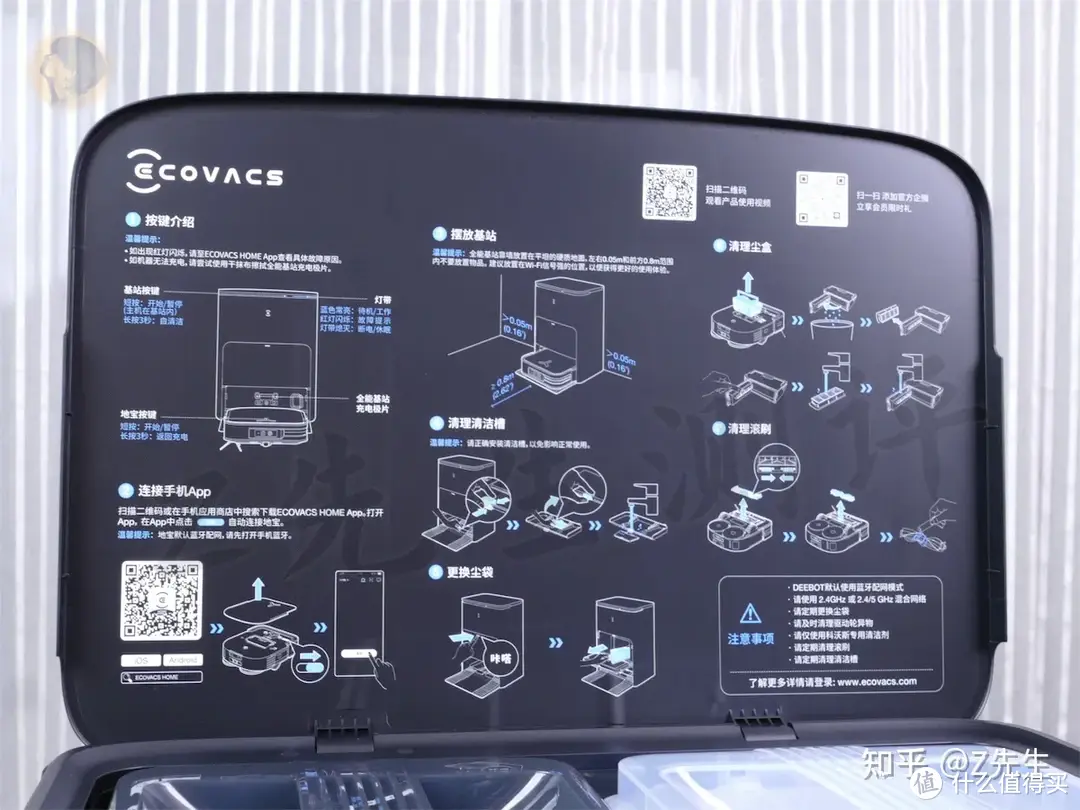
掀开上盖,内有非常详细的图文说明。即便说明书找不到了,参考这些内容维护机器基本没有问题。
打开上盖,露出两个基站水箱,清污水箱容量分别是4.5L和4L,比X1和T20系列的两个4L水箱要高一些。X2的清水箱还标配了银离子抑菌模块。

基站中部是自动集尘仓。仓门是按压式,而不是常见的磁吸设计,开闭更为方便。
 动图
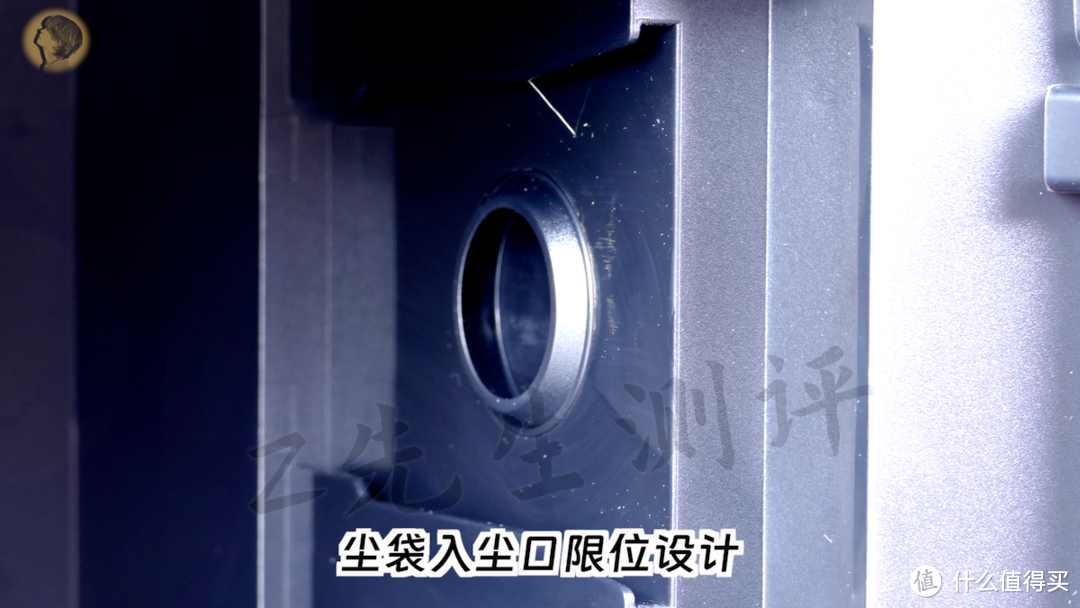
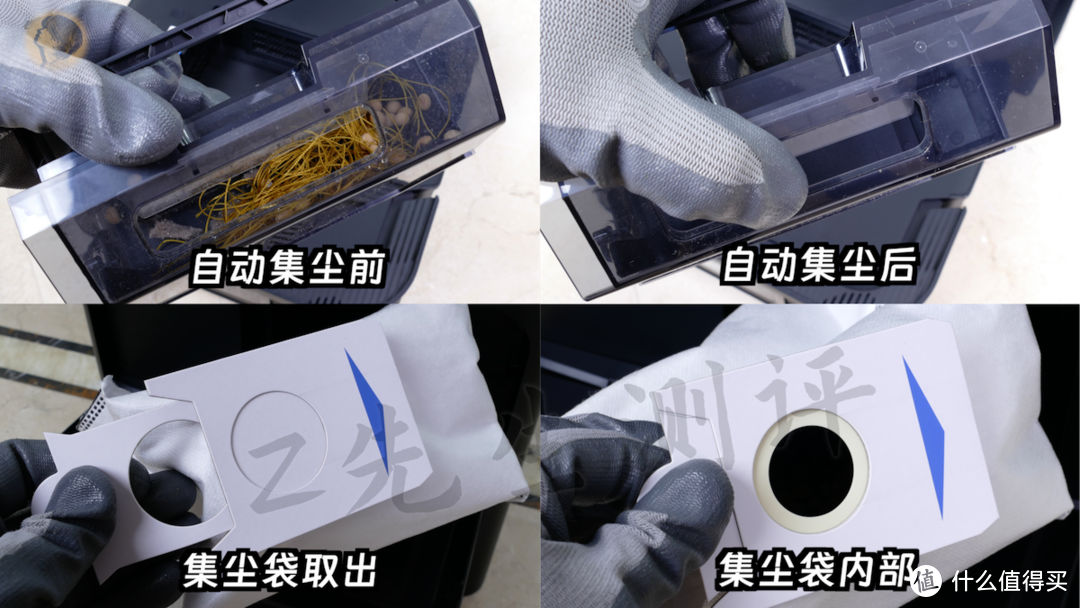
动图集尘袋容量3L,一次可用90天左右。尘袋提手也有一定的改良,提手纸质更厚,反复抽拉不变现。基站入尘口做了凸起的限位设计,取下尘袋时提手先封口,再整体取出,更换尘袋也不会造成二次污染,比之前科沃斯所有机型设计都更加合理。
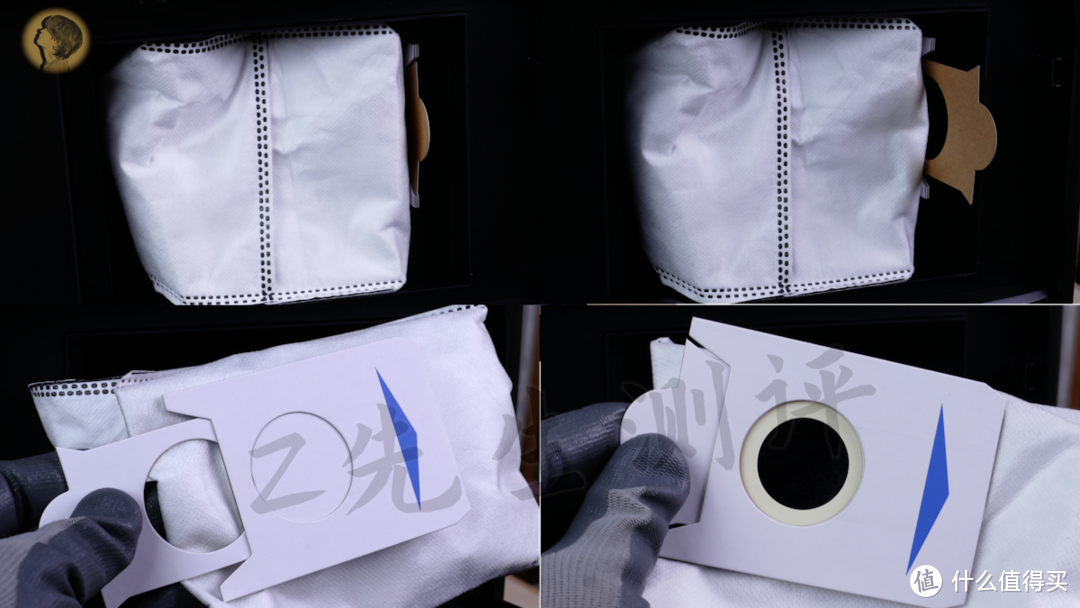
#基站尘袋入尘口的限位设计
X2的底座设计彻底打破重来,不再采用科沃斯过去2年来底部清洁盘不可拆卸的设计,是X2最大的升级之一:

X2的清洁盘整体可取下、中间过滤毛发的过滤网也可以取下,大幅提升自清洁的便利度。取下清洁盘,基站底部也会残留一些污渍,用纸擦拭即可:
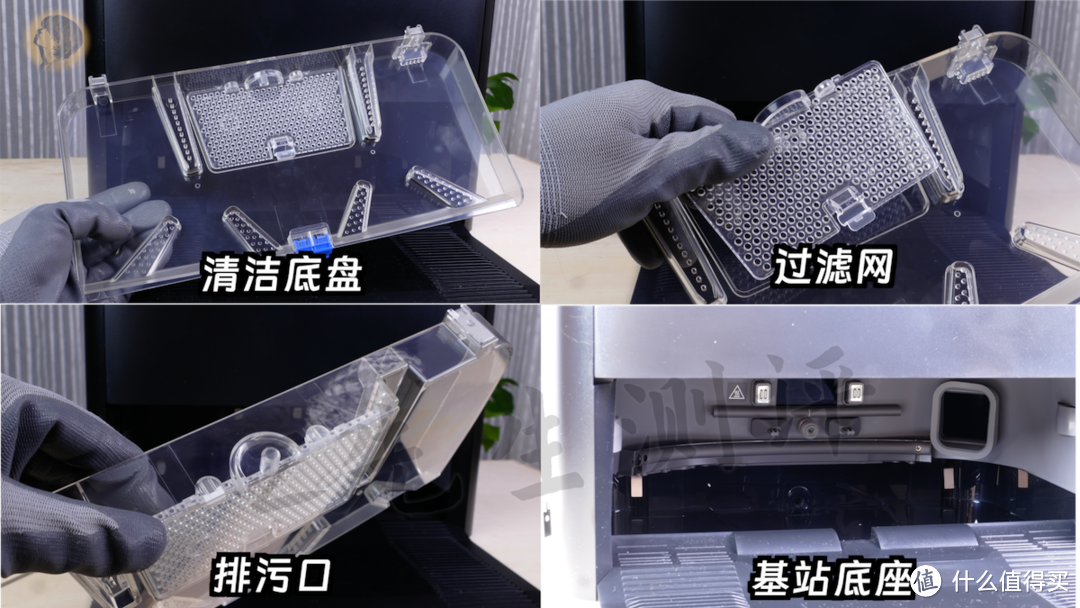
X2的上坡也可以拆卸清理,是新款机型较为常见的设计:
看基站背面,上方是提手,下方是电源线和收纳槽,还有为上下水模块预留的管道口、电源孔等。

总的来说,X2的主机设计有不少创新设计,细节的变化也不少,核心升级包括方形机身、半固态激光雷达、超长主刷、基站清洁盘可拆卸等。
四、性能实测
X2的产品形态变化以及配置升级,最终还是要落到实测。特别地,X2官宣在路径规划和算法方面更聪明,我也会专门针对这部分性能做测试(本章节第10点)。
1、导航建图
X2的建图速度并不算非常快,家里近50平有效面积(可清洁面积),环境较为复杂,大约耗时9分钟左右完成建图。建图时可切换3D和2D的效果,生成的地图和科沃斯之前一样会显示户型边缘。

2、扫地+自动集尘
先测试机器的扫地性能。
按照惯例,我会先观察机器边刷转速,以此判断颗粒物击飞的情况。下图可以看到,X2的沿边转速比弓字转速略微快一丢丢:
地面大面积投放黄豆,模拟大体积颗粒物,机器选择标准吸力,清洁次数选择两次,关闭颗粒物实验室功能,观察清洁效果。
可以看到,机器击飞颗粒物的情况相对较好,第一遍仅少数几颗黄豆被击飞,第二遍基本全部回收。但是,X2在高次清洁时,依旧不走沿边,而是直接走弓字清洁。如果第一遍垃圾被击飞到边缘,那么第二遍是无法清洁到的。不过,我观察到第二遍清洁机器走弓字时,离边缘较近才会调头转弯,也算是不走沿边的补偿。
将地面投放的垃圾换成黑米,模拟小颗粒物,同样机器设置标准吸力、清洁次数两遍,测试黑米回收情况。可以看到,由于黑米较轻,被击飞的情况比黄豆严重一丢丢,第一遍清洁完有一点被击飞到边缘,不过第二遍基本全部清洁掉了。

注意,这里没有打开实验室颗粒物功能,如果打开的话,边刷转速、机器速度均降低、机器吸力增大,可以进一步降低垃圾被击飞的情况。
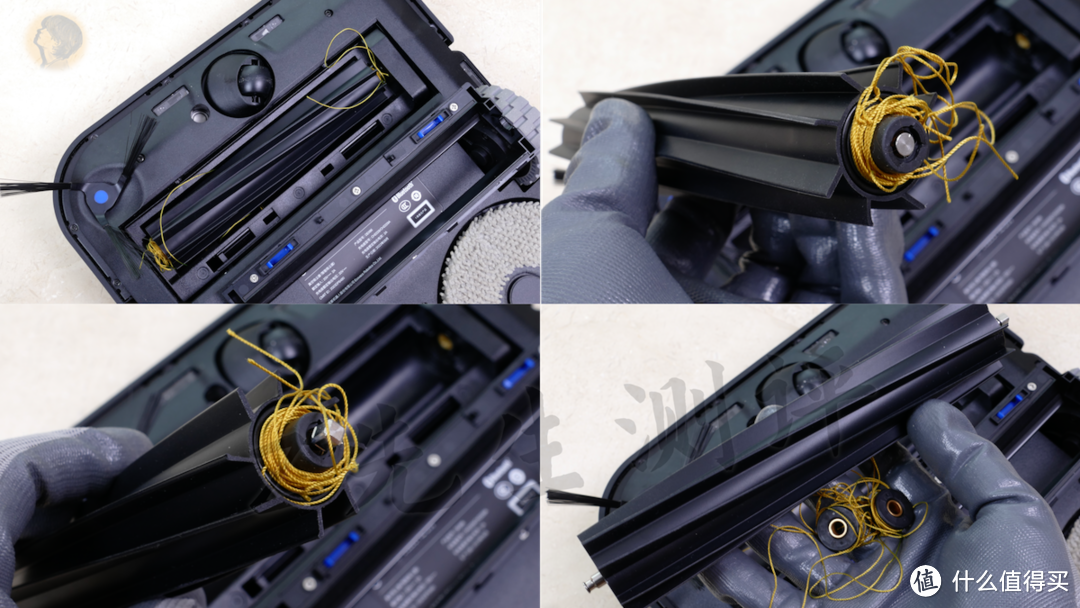
再来看毛发回收测试,地面投放15~20cm的金线模拟长头发,测试机器回收效果。可以看到,一遍过去全被回收,问题不大。
 动图
动图核心是观察金线缠绕的情况,翻过主机观察,可以看到:
边刷上没有金线被缠绕,应该和边刷设计有关;
主刷上缠绕较多金线,这是毛胶刷不可避免的,金线被收集在滚刷中间的凹槽和两头;
由于滚刷两头可拆卸,所以两侧被缠绕的金线较容易被取下;
滚刷中段被缠绕的金线缠绕不紧,清理起来也不算麻烦;
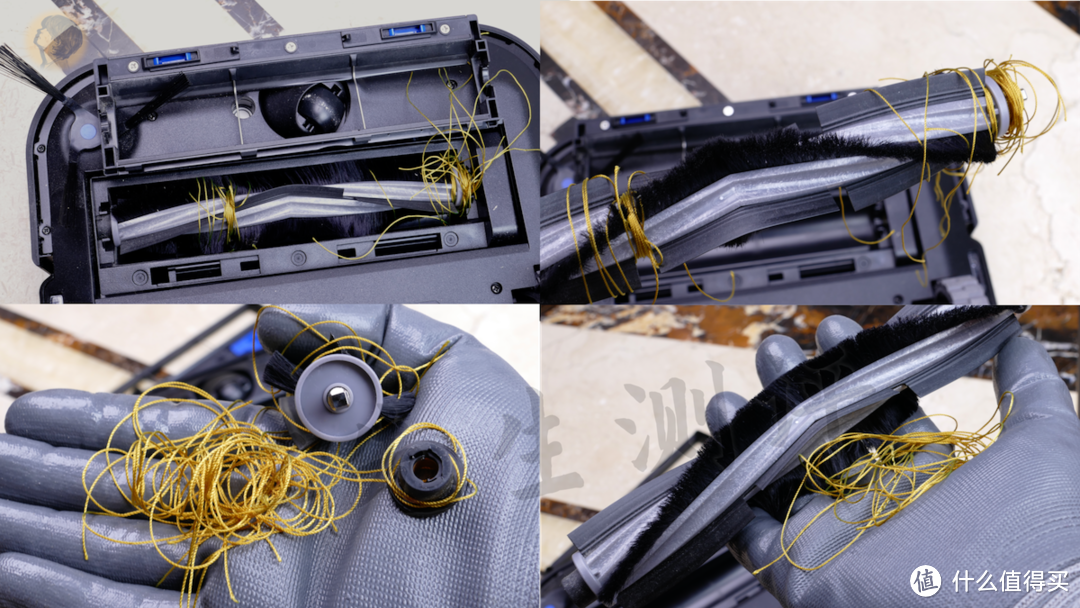
再换成胶刷主刷,同样进行金线回收测试。可以看到,胶刷主体上没有金线被缠绕,部分金线被直接吸入尘盒,剩余的被缠绕在胶刷两头。胶刷两头可拆卸,清理非常方便,一缕就缕掉了。
总结一下,我认为X2即便使用毛胶刷,清理毛发也比之前的机型更便利。如果希望毛发防缠绕更好,可使用胶刷。
再来看自动集尘功能,在一系列扫地测试后,开启自动集尘检验效果。可以看到,自动集尘效果非常好。尘袋内部还有抗菌涂层,可以防止异味和细菌滋生。
3、拖地+热水洗拖布
老规矩,地面投放5ml老抽用吹风机吹干,机器选择单拖、拖布湿度选择最高、选择精细拖地、打开热水洗拖布,观察拖地效果。也就是说,测试的是机器最强的拖地性能。
下面的动图可以看到,每执行完一遍井字清洁(两遍弓字),机器就热水回洗一次。大约第5次弓字之后,地面已经比较干净了;6次弓字(三次井字)之后,地面已经非常干净了。
 动图
动图在第一遍井字之后,翻过来看主机,观察单拖模式的交叉污染情况。可以看到,主刷对着地面的一侧附着了一点老抽,其他无任何残留。交叉污染相对可控。

进一步观察热水洗拖布前后对比情况,肉眼观察热水洗拖布的效果相当不错:
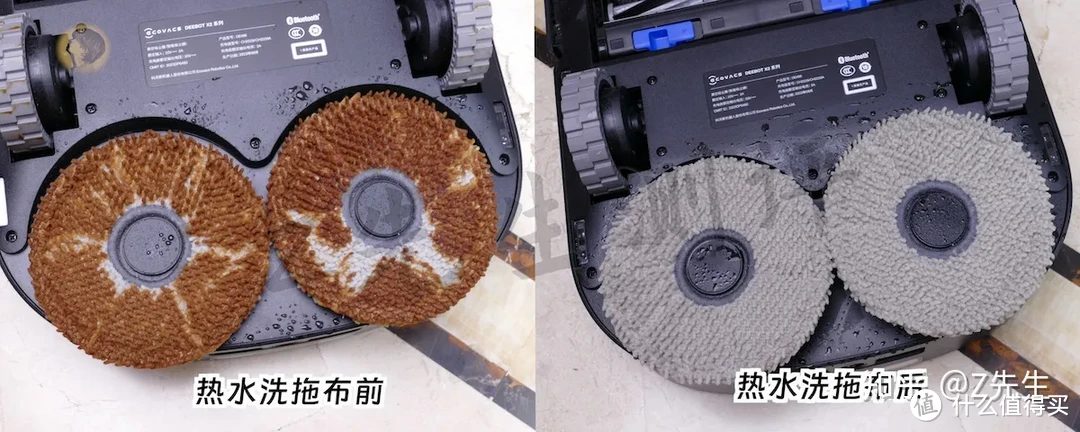
进一步验证,用纸巾擦拭热水洗之后的拖布,基本没有老抽残留,热水洗的确较为干净。

X2可开闭60°热水洗拖布功能,和冷水相比,热水的确可以更好地剥离污渍,避免未洗净的脏拖布造成二次污染。之前科沃斯主流机型基本使用55°热水洗功能,这次X2提升到了60°。洗拖布温度足够高,但又不至于淀粉类残留物糊化。
4、地毯清洁
这个环节主要观察机器拖布上下地毯算法是否细化,以及拖布抬升是否会打湿地毯。
先看机器上地毯,可以看到机器前端(地毯传感器的位置)试探地毯边缘时,拖布提前抬升,当机身进入地毯区域时,拖布已经完全抬升,不会打湿地毯边缘:
 动图
动图机器上地毯后,也会沿边和弓字清洁,同时加压清洁地毯:

机器下地毯时,机身完全下地毯后,拖布再放下,显然是算法做了优化,没有打湿地毯的情况。
 动图
动图可以看到,X2针对机器上下地毯做了算法优化,基本不会出现上下地毯打湿拖布。
5、边角清洁
X2作为一款方形机型,其中一个优势就是边角清洁能力。我们来仔细观察机器的内角和外角清洁覆盖率、以及是否有细节算法调教。
先看90度内角,可以看到当机器接触内角边缘时,边刷几乎完全覆盖到内角。不过之后立刻后退并转向。
再看90度外角,可以看到机器在转过外角之后,有一个后退的动作,可以更好地清洁边角附近的垃圾,算法上有做细化处理(这个算法和iRobot Roomba s9是一样的)。
 动图
动图我们来对比一下,之前的iRobot s9,D形机身。遇到内角时,会停留1秒钟,再后退转向;遇到外角时,采取和X2一样的策略,转向之后有一个后退的动作,再往前清洁。某种程度上说,s9的边角清洁细节更丰富。
总体来说X2的内外角清洁覆盖率还是比较高的,如果内角清洁可以有更细化的处理,就能进一步提升回收率。
6、避障
再来看机器的避障性能。
在夜视摄像头下,可以看到机器前端发出的双线结构光。另外,注意到由于X2不使用360°旋转的机械雷达,而是使用半固态激光雷达,所以激光有一定的覆盖范围。比如下面的动图,当机器左侧(雷达一侧)靠窗帘时,窗帘上可以看到机器打出的激光束;当机器人转到另一侧,窗帘就没有激光束。不过,X2可以通过更频繁地摆头和转向弥补这个问题。
地面放置鞋、矮罐、纸巾盒等中高障碍物,测试机器的避障能力。
其实X2这样的方形机身,在避障方面可能会吃点亏:方形机型遇到障碍物大多需要先后退再转向,对绕行算法也是一个考验。加上测试的辗转腾挪空间有限,机器人推动障碍物可能难以避免。不过,X2的机身较普通圆形机器人更窄,倒是它的优势。
下面的动图可以看到,X2对障碍物有一点推动(黑色矮罐推动最多),不过总体的避障减速、绕行,都还不错。

继续测试,使用低矮障碍物浣熊公仔、团状数据线、卷尺进行避障测试。
可以看到,除了对特别低矮的团状数据线推动一小段距离之外,其他障碍物的避障表现都不错。特别地,团状数据线虽然发生了推动,但没有被机器人吃掉,之后也成功对数据线进行绕行。应该说这个避障性能比市面上绝大多数机型都要更强。
对于地面突然出现的障碍物手套,机器反应速度也很快,迅速减速并绕开:
 动图
动图7、基站热烘
除了洗拖布、自动集尘、除菌功能外,基站还有拖布热烘功能。开启热烘后,使用热温枪录得最高温度为37度+。

默认热烘2小时,APP可选3、4小时。实测2小时后,左右拖布湿度为0.38和0.41,较为干燥。对于气候潮湿的区域,可以选择3或4小时烘干。

8、视频管家和语音助手
X2的视频管家和YIKO语音助手均有一定升级。
比如,X2 YIKO语音助手升级到了2.0,建立了『家具图谱』,在房间、家具之间建立关联,X2的语义识别能力也更强,可以理解并执行类似『去沙发和茶几之间打扫』之类的模糊、复杂指令。比如下图记录了我发出的指令『去电视柜和茶几之间扫地』,X2正确理解并顺利执行命令,反应时间很短。
 动图
动图X2的视频管家功能也有升级,比如新增HDR功能,在暗光条件下可以看得更清楚。
 动图
动图9、APP
X2的app几乎全新设计,易用程度提升不少。
APP首页可开闭一键AI智能托管。区域清洁不再单独做一个tab,改成启动键右侧区域添加按键,直接添加区域即可。

X2的工作日志显示内容更加丰富,不但有每日的清洁面积和时长统计,每个任务点击进入可显示详情,比如脏污地图、切换清洁轨迹、清洁时长和面积等。

主机和基站的清洁设置选项也比之前更加直观:

10、路径规划
前文提到,X2在自研的AINA模型加持下,路径规划能力更强。我就对机器人做几个小测试,检验一下X2是不是足够『聪明』。其实类似测试每款机器我都会做,但一般测评不会发布类似结果。
计划测试如下几个项目:
测试一:令机器去厨房清洁,但关上门,观察X2多久判断出无路可走;
测试二:机器在厨房,令机器回充,观察X2多久判断出无路可走;
测试三:机器在厨房,令机器回充,关门一阵子之后把门打开,观察X2如何处理;
测试四:接测试三,直接将门打开,令机器人回充,观察X2如何处理;
测试五:机器人回充路上增加两张椅子,观察X2如何选择路径;
测试六:直接将机器人困在椅子内,令机器回充,观察X2如何处理;
测试七:AB路径选择。令机器人去厨房清洁,地图有两条路可选,将A路径堵上,看机器人如何选择;
测试八:移动基站位置,观察机器人是否能顺利找到新基站、APP是否更新基站位置
我们一项项来看。
测试一:令机器去厨房清洁,但关上门,观察X2多久判断出无路可走。
机器人从原本打开的那扇门的位置尝试进入,发现不通往回走扫描一圈再沿两扇门都试探了一下,最终耗时大约1分40秒,机器报告『抱歉,未找到指定区域,返回基站』,之后结束任务返回基站。
 动图
动图测试二:机器在厨房,令机器回充,观察X2多久判断出无路可走;
机器人在厨房一直四处寻找出路,最终经历3分20秒左右,机器报『抱歉,未发现基站信号,请将机器人放到基站正前方,点击返回基站试试』,总的耗时不短。
 动图
动图测试三:机器在厨房,令机器回充,关门一阵子之后把门打开,观察X2如何处理
接测试二,app操控令机器人回充,在1分20秒左右打开房门。机器人在反复重定位和寻找后,很可惜最终没有走出打开的房门。总耗时约1分50秒报告『抱歉,未发现基站信号,请将机器人放到基站正前方,点击返回基站试试』。或许我早点开门,会有不同的效果。
 动图
动图测试四:接测试三,直接将门打开,令机器人回充,观察X2如何处理;
接上个测试,直接打开门,再令机器人回充。这次非常顺利,直接找到开的门顺利回基站。
 动图
动图测试五:机器人回充路上增加两张椅子,观察X2如何选择路径;
机器从厨房回基站,在必经之路上放置两个椅子。可以看到X2直接从椅子边上绕过并一次性成功回充到基站,效率非常高。特别地,基站正前方这张椅子,我故意把椅腿放在距离基站很近的极限位置,比理论预留的回充距离更短。可以看到X2依旧顺利回充,甚至是斜着机身回基站的。
这项测试X2表现非常好,回充路径规划高效,没有任何拖泥带水。
 动图
动图测试六:直接将机器人困在椅子内,令机器回充,观察X2如何处理;
其实这个测试有点极限,4个椅腿前后的距离较窄、左右的距离较宽,X2在定位转了几圈后选择较宽出口(从左右之间)穿出,顺利回充。之前测试过很多圆形机型,非常多款机型被困在里面直接就出不来,直接报错。
 动图
动图测试七:AB路径选择。令机器人去厨房清洁。地图有AB两条路可选,先把A路径人为堵上,看机器人如何选择
可以看到,机器人出基站甚至没有试探,直接绕过前方的椅子,走了A路径。发现A路不通,很快就从B路走了,并且顺利绕开另一张椅子,从中间的缝隙穿过并转弯。这个测试也验证了X2具备很强的环境变化应对能力。
 动图
动图测试八:移动基站位置,观察机器人是否能顺利找到新基站、APP是否更新基站位置
机器人原基站位置在客厅,令机器人去主卧清洁,并将基站移至主卧,观察机器人是否找打基站的新位置。下面三幅图是过程中三个阶段,第一幅记录了机器人离开基站去左边的卧室清洁;第二幅记录了机器人在卧室清洁,其实这时候基站已经搬到了卧室,但APP暂时没有更新基站位置;第三幅记录了机器人找到基站在卧室并回城,APP也更新了新位置。
在机器人清洁完卧室后,先回客厅基站原位置寻找基站,无法找到后全屋巡航了一下,在卧室找到了新基站。整个过程中,机器人并没有像其他机型一样立刻重新建图。

总结一下,我认为X2的路径规划能力属于行业第一梯队,判断最佳路径、应对环境变化、反应速度都很强。特别地,X2在上述一系列测试中,未发生丢地图、以及轻易重建图的情况。
五、总结

总结一下,科沃斯X2作为科沃斯最新最贵的旗舰,使用创新的方案(方形、半固态激光雷达、超低机身)同时匹配升级的算法(AINA模型、AIVI 3D 2.0、YIKO 2.0等),没有带来太多新问题,综合性能较强。
其优点包括:
扫地方面边刷转速调教还不错,加上超长主刷,一般垃圾回收问题不大。较脏区域建议打开实验室颗粒物进一步降低垃圾击飞、选择清洁2次。家里毛发多可使用胶刷;
拖地方面60°热水洗拖布效果较好,洗完拖布基本没有污渍残留,拖地效果也是第一梯队;
避障方面虽然机器会发生推动障碍物的情况,但均可以较好识别障碍物、并且采用不同绕行策略,对于突然出现的障碍物反应速度也很快;
地毯清洁方面算法明显进行了优化,上下地毯拖布及时抬升和放下,不打湿地毯边缘;
边角清洁有一定的算法优化,比如外角清洁有一个后退的动作;
基站底部清洁盘整体可取下,清洁较为便利;
路径规划和定位总体较强,对于环境发生的变化反应快、及时修改路径,不会随意丢地图或重新建图;
APP的设计和UI风格发生变化,更加易用;
当然了,没有一款机型是完美的,我认为可以改进的方面包括:
内角清洁可以算法优化,比如停顿1~2秒;
扫地高次清洁依旧不走沿边,建议第二遍先沿边;
目标区域无路可走,或者困在区域内无法回充,可以更早地做出无法回充/到达目的地的决策;
长期使用的话,由于半固态激光雷达内置在撞板处,撞板又会被反复碰撞,稳定性和耐用程度是考验;
针对地毯仅有地毯增压的选项,建议增加针对不同类型地毯的策略选项,比如规避、跨越等;
总得来说,X2综合性能较强,不光导航避障、清洁性能都较强,机器也更加聪明。如果你的预算超过5000,是可以考虑入手X2的:
好了,科沃斯X2的测评就到这里,希望能帮到大家,给大家给来不同的视角。如果你觉得写得不错,欢迎点赞,并关注我。和机型相关问题,请随时留言讨论。
我是Z先生,我们下一篇测评再见~
作者声明本文无利益相关,欢迎值友理性交流,和谐讨论~
















dulei6128
校验提示文案
值友4984304979
校验提示文案
牛牛0505
校验提示文案
牛牛0505
校验提示文案
值友4984304979
校验提示文案
dulei6128
校验提示文案