






























































































348
340
解密智能汽车无图智驾技术原理和安全性
2023-11-23 14:46:07
2点赞
2收藏
0评论
与无图智能驾驶对应的是高精地图智能驾驶,其方案主要是依赖精度为±20厘米的地图参考路线进行自动行驶
无图智能驾驶,准确的说是无高精地图智能驾驶,普通地图还是有的,这就需要车辆极大限度的提升自己的实时识别和判断能力
目前主流车企使用的都是车辆传感器+智驾算法来落地的,其中智驾算法又基本都是基于大模型的BEV+Transformer或更为先进的Occupancy+Transformer
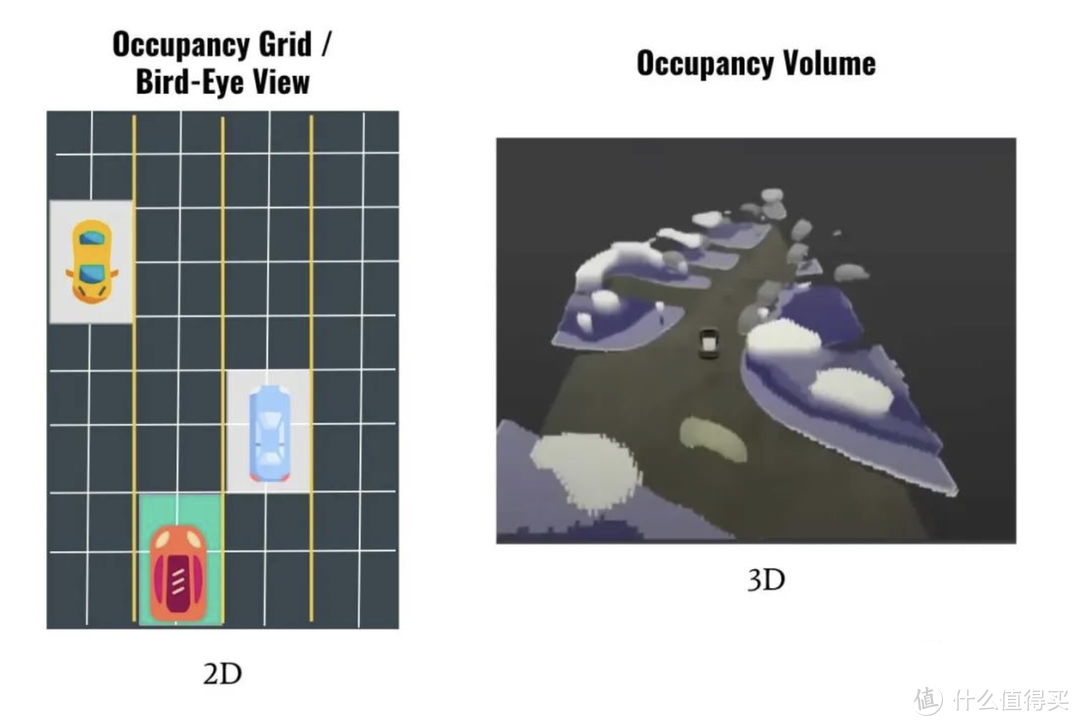
简单介绍下Occupancy+Transformer的原理,Occupancy其实就是occupancy networks占用神经网络算法,其本质是将世界划分为一个个的单元网格,然后利用传感器回来的信息,定义和预测这些单元网格哪些被占用、哪些是空闲的,从而控制车辆始终行驶在空闲的单元网格中
占用网络的算法核心就像它自身的名字一样,是为了计算物理占用体积而不是真实形状
将世界划分为一个个网格,如果传感器识别到一辆卡车,则将其放置在一各7*3的矩形的坐标里,识别到一个人,则将其放到1*1的网格里,区别在于最初的BEV只是二维网格,而Occupancy则加上了高度信息,成为三维网格
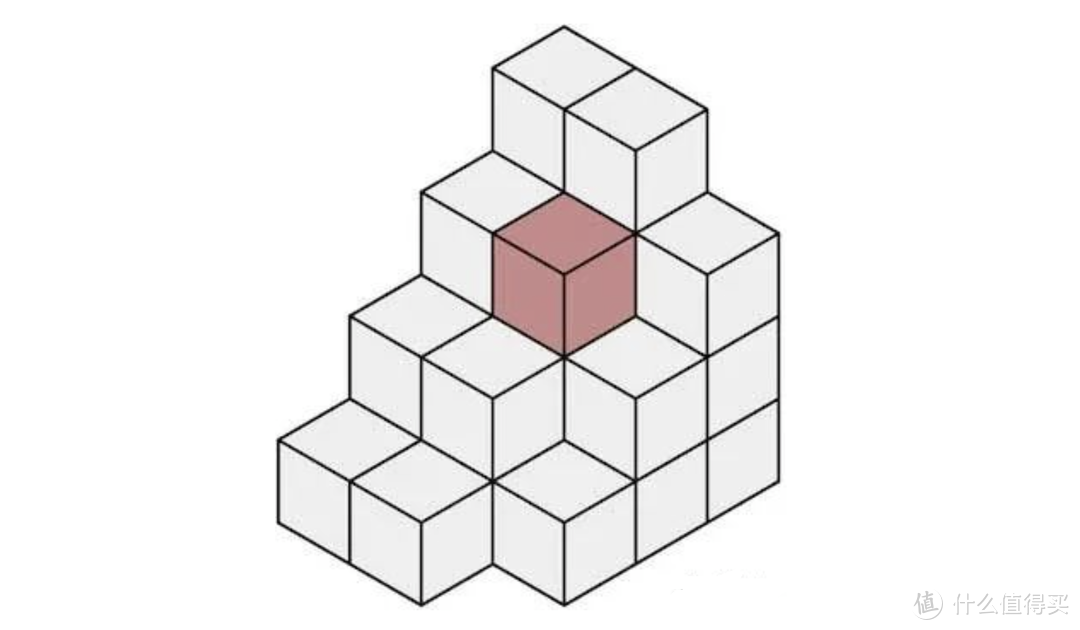
occupancy networks是将世界划分为微小(或超微小)的立方体或体素,来预测每个体素是空闲 还是被占用
一个完整的Occupancy+Transformer原理:
传感器(摄像头、雷达等)获取信息
信息被发送到计算中心
计算中心使用键、值和固定查询(汽车与非汽车、公共汽车与非公共汽车、交通标志与非交通标志等)来生成占用特征量
跟进向量产生一个占用特征体积,然后将其与之前的体积(t-1、t-2 等)融合,以获得4D占用网格
使用算法输出两个量值:Occupancy Volume和Occupancy Flow,其中Occupancy Volume定义长宽高维度,Occupancy Flow定义时间维度
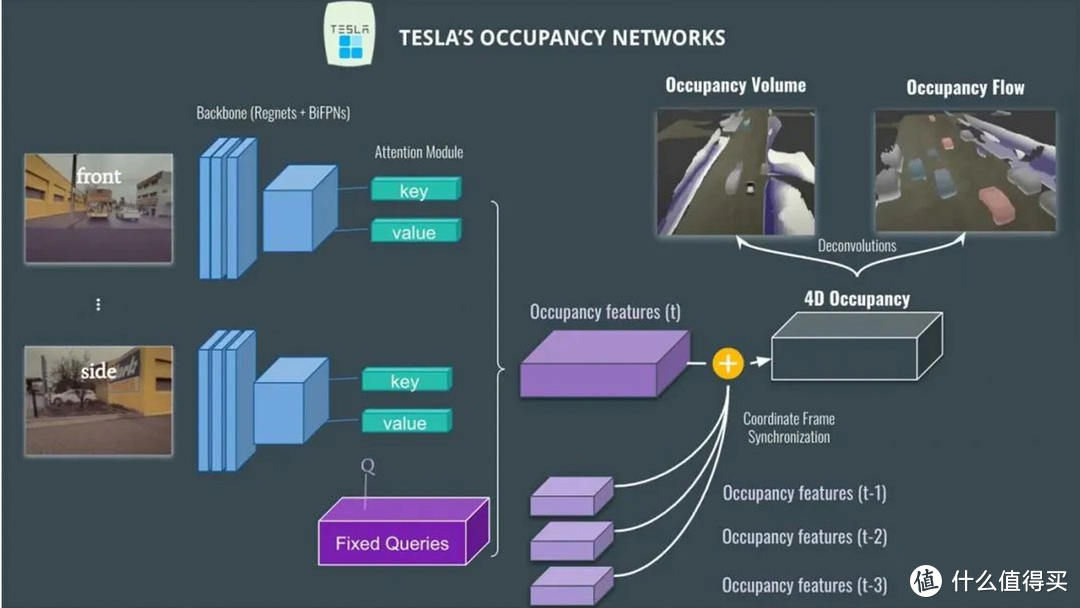
Occupancy+Transformer算法通过100FPS的速度,每10ms运算一次周围环境的网格占用体积,并给出预测,所以它的附带时间的三维效果图是下面这样的:
Occupancy Flow通过颜色显示每个对象的运行方向:向前—红色, 向后—蓝色,静止—灰色等等
目前使用BEV+Transformer的厂商,小鹏、蔚来、理想、毫末智行、智己等
提供Occupancy+Transformer的厂商主要是特斯拉和华为
至于安全性,目前各家智能驾驶更加放心的还是高速领航和通勤线路自动驾驶,城市领航辅助,还在试点和小范围推广阶段,但相信随着大模型算法的训练数据越来越多,安全性也是会逐渐过渡到一个相对值得信赖的程度的















